MC_SetCartesianTransform, MCP_SetCartesianTransform – Kartézská transformace
Symboly blokůPotřebná licence: COORDINATED MOTION

Popis funkce
Bloky MC_SetCartesianTransforms a MCP_SetCartesianTransforms mají naprosto
shodnou funkci, jediným rozdílem je, že MCP_ varianta bloku má méně vstupů a
potřebné konstanty se zadávají jako parametry bloku.
Blok MC_SetCartesianTransform nastavuje kartézskou transformaci mezi souřadnými systémy. V systému lze definovat několik kartézkých transformací. Kterou chceme nastavit se vybírá parametrem SelTrans. Pomocí vstupů Trans se nastavuje posunutí v jednotlivých osách. Pomocí vstupů RotAngle se pak nastavuje rotace kolem daných os (pořadě osa Z, osa Y, osa X). Pomocí vstupů Aux se nastavuje transformace dodatečných os, pokud je systém/kinematická transformace používá (transformace je přičtení v jednotlivých aux souřadnicích).
Vstupy
uAxesGroup | Odkaz na skupinu os | Reference |
Execute | Náběžná hrana aktivuje blok | Bool |
Relative | Výběr absolutní (=false) nebo relativní (=true) transformace; absolutní transformace nastaví transformační matici podle nových hodnot, relativní transformace přidá nové hodnoty již nastavené transformaci (tj. vynásobí původní a novou transforemační matici) | Bool |
SelTrans | Výběr transformace pro nastavení 1 | Long (I32) |
|
|
|
TransX | Posun v ose X | Double (F64) |
TransY | Posun v ose Y | Double (F64) |
TransZ | Posun v ose Z | Double (F64) |
RotAngle1 | Úhel rotace podél osy Z | Double (F64) |
RotAngle2 | Úhel rotace podél osy Y | Double (F64) |
RotAngle3 | Úhel rotace podél osy X | Double (F64) |
Aux1 | posun v 1. doplňkové ose | Double (F64) |
Aux2 | posun v 2. doplňkové ose | Double (F64) |
Aux3 | posun v 3. doplňkové ose | Double (F64) |
Výstupy
yAxesGroup | Odkaz na skupinu os | Reference |
Done | Příznak dokončení algoritmu | Bool |
Busy | Příznak, že algoritmus ještě neskončil | Bool |
Error | Příznak chyby | Bool |
ErrorID | Výsledek poslední operace | Error |
|
|
|
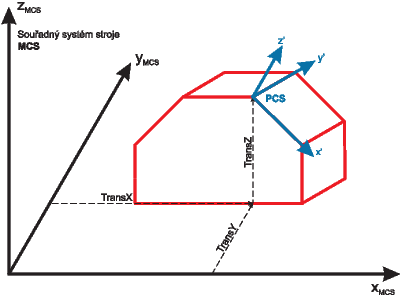
Definice translace a rotace
Na prvním obrázku je uveden příklad translace ze souřadného systému MCS do souřadného systému PCS.
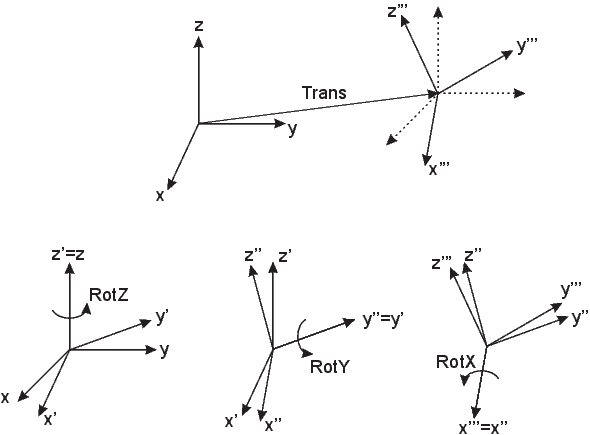
Na druhém obrázku je pak uveden přiklad rotace. Kdy celková rotace je docílena postupným provedením dílčích rotací kolem jednotlivých os.
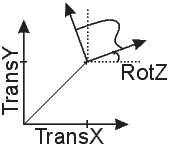
Ukázka zadání kartézské transformace (v rovině). Pro dosažení transformace na obrázku níže se spustí blok MC_SetCartesianTransform s nastavenou transformací {50,50,0,30,0,0}
[Předchozí] [Na začátek] [Výše] [Další]
2024 © REX Controls s.r.o., www.rexygen.com