MC_CamIn, MCP_CamIn – Zapnutí vačky
Symboly blokůPotřebná licence: MOTION CONTROL

Popis funkce
Bloky MC_CamIn a MCP_CamIn mají naprosto shodnou funkci, jediným rozdílem je, že
MCP_ varianta bloku má méně vstupů a potřebné konstanty se zadávají jako parametry
bloku.
Blok MC_CamIn zapíná režim, kdy je podřízená osa (tj. ta, která je připojena ke vstupu uSlave) řízena tak, že její poloha je závislá na poloze hlavní osy (tj. ta, která je připojena ke vstupu uMaster), přičemž převodní funkce je určena blokem MCP_CamTableSelect připojeným ke vstupu CamTableID. Pokud převodní funkci označíme , polohu hlavní osy a polohu podřízené osy , pak platí (pro absolutní režim, bez fázování):
Tento režim osy je často nazýván elektronická vačka.
Režim vačky lze ukončit zapnutím jiného pohybu na podřízené ose v režimu aborting nebo spuštěním bloku MC_CamOut. Pokud vačka (její definiční funkce - viz popis bloku není cyklická MCP_CamTableSelect), dojde k ukončení režimu vačky také při vyjetí hlavní osy z definičního oboru funkce vačky. Toto je signalizováno výstupem EndOfProfile.
Při aktivaci funkce vačky (tj. v okamžiku, kdy blok MC_CamIn převezme řízení osy) nemusí poloha a rychlost (popř. i zrychlení, ale současná implementace při zapnutí vačky jerk neuvažuje a připouští skok ve zrychlení) odpovídat požadovaným hodnotám, tj. poloze a rychlosti hlavní osy a profilu vačky. V takovém případě záleží na hodnotě parametru RampIn. Pokud má parametr hodnotu 0, režim vačky se nezapne a je signalizována chyba -707 (skok v poloze nebo rychlosti). Pokud je parametr kladný, nastává přechodový děj, kdy poloha ještě neodpovídá poloze podle definice vačky - tzv. RampIn režim. Parametr RampIn přibližně odpovídá rychlosti, kterou by se podřízená osa pohybovala během RampIn režimu, kdyby hlavní osa stála. Pokud se hlavní osa pohybuje, pak je výsledný pohyb určen součtem pohybu daného definicí vačky a pohybu daného RampIn režimem se stojící hlavní osou. Pokud je potřeba RampIn režim použít, volíme parametr RampIn přibližně 0,1 až 0,5 maximální rychlosti podřízené osy a pokud dojde k chybě překročení maximální rychlosti nebo zrychlení během RampIn režimu, tak jej zmenšíme.
Vstupy
uMaster | Odkaz na hlavní osu | Reference |
uSlave | Odkaz na podřízenou osu | Reference |
CamTableID | Odkaz na vačku (spojit s MCP_CamTableSelect.CamTableID) | Reference |
Execute | Náběžná hrana aktivuje blok | Bool |
MasterOffset | Posunutí v definici vačky na straně hlavní osy [unit] | Double (F64) |
SlaveOffset | Posunutí v definici vačky na straně podřízené osy [unit] | Double (F64) |
MasterScaling | Měřítko pro definici vačky (strana hlavní osy) | Double (F64) |
SlaveScaling | Měřítko pro definici vačky (strana podřízené osy) | Double (F64) |
StartMode | Volba absolutního nebo relativního profilu vačky | Long (I32) |
|
|
|
BufferMode | Režim převzetí osy | Long (I32) |
|
|
|
RampIn | RampIn faktor (0 = RampIn režim se nepoužívá); odpovídá přibližně rychlosti synchronizace [unit/s] podřízené osy na polohu vačky | Double (F64) |
Výstupy
yMaster | Odkaz na hlavní osu | Reference |
ySlave | Odkaz na podřízenou osu | Reference |
InSync | Příznak dosažení profilu vačky podřízenou osou | Bool |
CommandAborted | Příznak přerušení funkce bloku | Bool |
Busy | Příznak, že algoritmus ještě neskončil | Bool |
Active | Příznak, že blok řídí osu | Bool |
Error | Příznak chyby | Bool |
ErrorID | Výsledek poslední operace | Error |
|
|
|
EndOfProfile | Příznak dosažení konce profilu vačky (u necyklické vačky konec pohybu) | Bool |
SyncDistance | Odchylka v poloze podřízené osy od synchronizované polohy | Double (F64) |
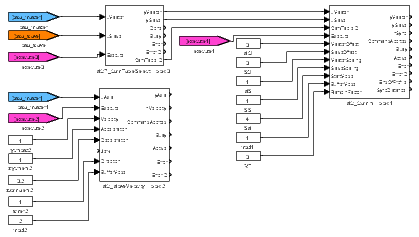
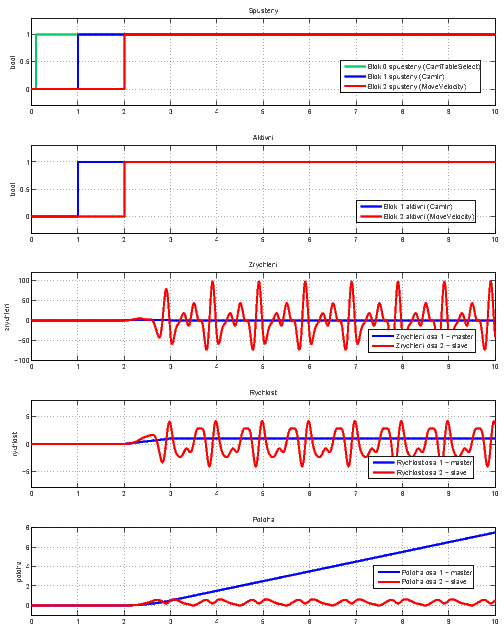
Příklady
[Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com