MC_CombineAxes, MCP_CombineAxes – Kombinace pohybu dvou os do třetí
Symboly blokůPotřebná licence: MOTION CONTROL
Popis funkce
Bloky MC_CombineAxes a MCP_CombineAxes mají naprosto shodnou funkci, jediným
rozdílem je, že MCP_ varianta bloku má méně vstupů a potřebné konstanty se zadávají
jako parametry bloku.
Blok MC_CombineAxes kombinuje pohyb dvou os do třetí. V podstatě se
jedná o výpočet nové žádané pozice na základě dvou poloh. Platí, že
Blok umožňuje zadat do parametru GearRatio... záporné číslo a výsledný pohyb podřízené osy může být rozdíl poloh obou hlavních os. Primárně by se měl rozdíl realizovat pomocí parametru CombineMode
Vstupy
uMaster1 | Odkaz na první hlavní osu | Reference |
uMaster2 | Odkaz na druhou hlavní osu | Reference |
uSlave | Odkaz na podřízenou osu | Reference |
Execute | Náběžná hrana aktivuje blok | Bool |
GearRatioNumeratorM1 | Čitatel převodového poměru master osy 1 | Long (I32) |
GearRatioDenominatorM1 | Jmenovatel převodového poměru master osy 1 | Long (I32) |
GearRatioNumeratorM2 | Čitatel převodového poměru master osy 2 | Long (I32) |
GearRatioDenominatorM2 | Jmenovatel převodového poměru master osy 2 | Long (I32) |
BufferMode | Režim převzetí osy | Long (I32) |
|
|
|
CombineMode | Režim sloučení os 1 | Long (I32) |
|
|
|
RampInFactor | RampIn faktor (0 = RampIn režim se nepoužívá); rychlost synchronizace [unit/s] podřízené osy na polohu vačky odpovídá přibližně RampIn * MaxVelocityAppl, kde MaxVelocityAppl se zadává v bloku RM_Axis připojeného ke vstupu uSlave; analogicky zrychlení | Double (F64) |
Výstupy
yMaster1 | Odkaz na první hlavní osu | Reference |
yMaster2 | Odkaz na druhou hlavní osu | Reference |
ySlave | Odkaz na podřízenou osu | Reference |
InSync | Příznak dosažení profilu vačky podřízenou osou | Bool |
CommandAborted | Příznak přerušení funkce bloku | Bool |
Busy | Příznak, že algoritmus ještě neskončil | Bool |
Active | Příznak, že blok řídí osu | Bool |
Error | Příznak chyby | Bool |
ErrorID | Výsledek poslední operace | Error |
|
|
|
SyncDistance | Odchylka v poloze podřízené osy od synchronizované polohy | Double (F64) |
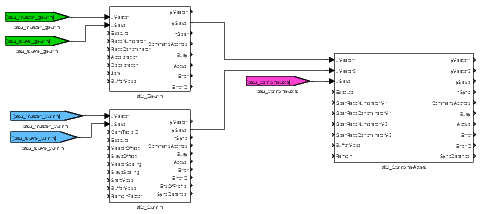
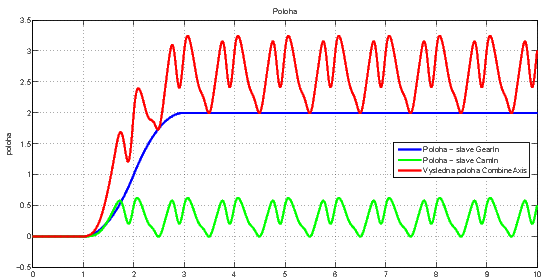
Příklad
[Předchozí] [Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com