PSMPC – Prediktivní „pulse-step“ regulátor
Symbol blokuPotřebná licence: ADVANCED

Popis funkce
Funkční blok PSMPC (Pulse Step Model Predictive Control) je určen pro realizaci vysoce
kvalitních regulátorů pro obtížně regulovatelné lineární časově invariantní
soustavy s omezením akční veličiny (např. soustavy s dopravním zpožděním
nebo s neminimální fází). Zvlášť výhodný je pro případy, kdy je
požadován velmi rychlý přechod z jedné hodnoty regulované veličiny na druhou bez
překmitu. Regulátor PSMPC však může být obecně použit všude tam, kde je
běžně nasazován standardní PID regulátor a kde žádáme vysokou kvalitu
regulace.
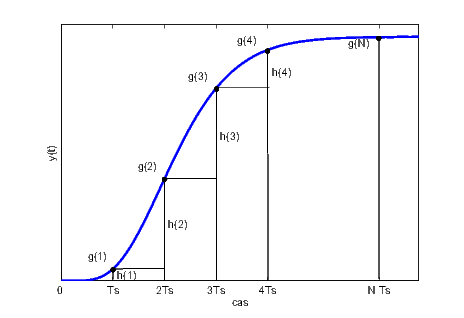
PSMPC je prediktivní regulátor s explicitně zadaným intervalovým omezením akční veličiny. Pro účely predikce je použit model ve tvaru diskrétní přechodové charakteristiky . Na obrázku výše je naznačen způsob, jakým lze tuto posloupnost získat ze spojité přechodové charakteristiky. Poznamenejme, že musí být zvoleno dostatečně velké, aby přechodová charakteristika byla popsána až do ustáleného stavu (, kde je perioda vzorkování regulátoru a je doba ustálení na 95 % konečné hodnoty). Pro systémy s monotónní přechodovou charakteristikou je alternativně možné použít momentový množinový model [3] a popsat systém pouze třemi charakteristickými čísly a , které je možno určit z jednoduchého pulzního experimentu. Řízený systém pak aproximujeme buď přenosem prvého řádu s dopravním zpožděním
| (7.1) |
nebo přenosem druhého řádu s dopravním zpožděním
| (7.2) |
se stejnými charakteristickými čísly. Typ aproximace se zadává parametrem imtype.
Pro zjednodušení on-line optimalizace v otevřené smyčce je množina přípustných posloupností řízení omezena pouze na posloupnosti ve tvaru "pulz-skok"zobrazené na obrázku níže.
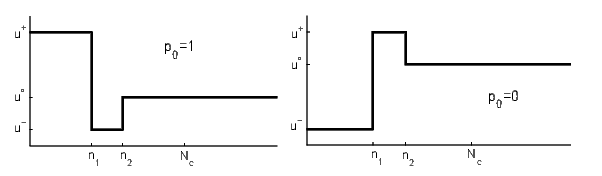
Poznamenejme, že každá taková posloupnost je jednoznačně určena jen třemi čísly a , kde je horizont řízení a označují po řadě zadanou dolní a horní mez akční veličiny regulátoru. On-line optimalizace (vzhledem k a ) spočívá v minimalizaci kritéria
| (7.3) |
kde je v kroku predikovaná regulační odchylka na intervalu predikce , jsou diference řídicího signálu na intervalu a je koeficient penalizace změn akční veličiny. Pro nalezení optima úlohy (7.3) je použita kombinace metody nejmenších čtverců a hrubé síly. Hodnota je určena pro všechny přípustné kombinace , a a následně je z nich vybrána optimální řídicí sekvence pro řízení v otevřené smyčce. Ve skutečnosti je však vždy aplikován pouze prvý krok této řídicí sekvence a v další vzorkovací periodě je celý optimalizační proces zopakován. Tím se řídicí strategie mění na zpětnovazební řízení.
Parametry prediktivního regulátoru, kromě modelu řízené soustavy a omezení jejího vstupu, jsou horizont řízení , horizont predikce a koeficient . Pouze poslední uvedený parametr je určen pro ruční doladění kvality regulace při rutinním uvádění do provozu. V případě použití modelu soustavy ve tvaru přenosu (7.1) nebo (7.2) jsou parametry zvoleny automaticky na základě charakteristických čísel . Regulátor potom může být efektivně laděn „ručně“ pouze seřizováním charakteristických čísel procesu .
Varování
Při použití bloku PSMPC pro simulaci v systému Matlab/Simulink je třeba zajistit, aby
pole sr byl dostatečně velké, tak aby jím definovaný buffer pojmul interně
vygenerovanou přechodovou charakteristiku určenou z FOPDT nebo SOPDT modelu. V
opačném případě blok hlásí chybu.
Vstupy
sp | Požadovaná hodnota (setpoint) | Double (F64) |
pv | Řízená veličina | Double (F64) |
tv | Veličina pro vysledování (použitý řídicí signál) | Double (F64) |
hv | Hodnota výstupu v manuálním režimu | Double (F64) |
MAN | Manuální nebo automatický režim | Bool |
|
|
|
Výstupy
mv | Akční zásah regulátoru (manipulated variable) | Double (F64) |
dmv | Rychlostní výstup regulátoru (diference) | Double (F64) |
de | Regulační odchylka | Double (F64) |
SAT | Saturace | Bool |
|
|
|
pve | Predikovaná hodnota regulované veličiny na základě zadaného modelu | Double (F64) |
iE | Kód chyby | Long (I32) |
|
|
|
Parametry
nc | Délka horizontu řízení () 5 | Long (I32) |
np1 | Začátek koincidenčního intervalu () 1 | Long (I32) |
np2 | Konec koincidenčního intervalu () 10 | Long (I32) |
lambda | Koeficient penalizace změn řízení () 0.05 | Double (F64) |
umax | Horní mez akčního zásahu regulátoru () 1.0 | Double (F64) |
umin | Dolní mez akčního zásahu regulátoru () -1.0 | Double (F64) |
imtype | Typ modelu řízené soustavy 3 | Long (I32) |
|
|
|
kappa | Statické zesílení () 1.0 | Double (F64) |
mu | Míra zpoždění soustavy () 20.0 | Double (F64) |
sigma | Míra délky odezvy soustavy () 10.0 | Double (F64) |
nmax | Reservovaná velikost pole 10 10000 32 | Long (I32) |
sr | Diskrétní přechodová charakteristika () [0 0.2642 0.5940 0.8009 0.9084 0.9596 0.9826 0.9927 0.9970 0.9988 0.9995] | Double (F64) |
[Předchozí] [Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com