Ovladač systému REXYGEN pro 1-Wire
(modul OwsDrv)
Uživatelská příručka
Plzeň
15.12.2023
Obsah
1.1 Úvod
1.2 Požadavky na systém
1.3 Instalace ovladače na vývojovém počítači
1.4 Instalace ovladače na cílovém počítači
1.4.1 Zprovoznění 1Wire serveru
2 Zařazení ovladače do projektu aplikace
2.1 Přidání ovladače OwsDrv do projektu
2.2 Připojení vstupů a výstupů do řídicího algoritmu
3 Konfigurace ovladače
3.1 Konfigurační dialogové okno
3.2 Využití alarmů programu owfs
3.3 Speciální signály
4 Co dělat při problémech
Kapitola 1
Ovladač OwsDrv a systém REXYGEN
1.1 Úvod
V této příručce je popsáno používání ovladače OwsDrv pro výměnu dat s 1-Wire [1] čidly a zařízeními ze systému REXYGEN. Ovladač OwsDrv využívá programový balík OWFS [2], zejména jeho část owserver.
Pomocí tohoto ovladače je možné komunikovat se všemi zařízeními, která jsou v OWFS podporována.
1.2 Požadavky na systém
Aby bylo možno ovladač využívat, musí být na vývojovém (konfiguračním) počítači a na cílovém zařízení (počítači) nainstalováno programové vybavení:
|
Vývojový počítač |
|
|
Operační systém |
jeden ze systémů: Windows 10/11, GNU/Linux |
|
Vývojové nástroje |
verze REXYGEN pro daný operační systém |
|
Cílové zařízení |
|
|
Řídicí systém REXYGEN |
verze pro GNU/Linux |
|
1-Wire ovladač |
verze pro GNU/Linux |
|
OWFS |
verze pro GNU/Linux |
|
|
|
|
|
|
1.3 Instalace ovladače na vývojovém počítači
Ovladač OwsDrv se instaluje jako balíček řídicího systému REXYGEN. Je obsažen
v instalátoru vývojových nástrojů systému REXYGEN, pro jeho nainstalování je
pouze nutné ho v instalačním programu systému REXYGEN zaškrtnout.
Po typické instalaci se řídicí systém REXYGEN nainstaluje do cílového
adresáře
C:\Program Files\REX Controls\REX_<version>, kde <version> označuje verzi systému
REXYGEN.
Po úspěšné instalaci se do cílového adresáře zkopírují soubory:
- bin\OwsDrv_H.dll – Konfigurační část ovladače OwsDrv.
- DOC\CZECH\OwsDrv_CZ.pdf – Tato uživatelská příručka.
1.4 Instalace ovladače na cílovém počítači
Pokud ještě nemáte na cílovém zařízení (např. Raspberry Pi) nainstalovaný runtime modul RexCore řídicího systému REXYGEN, nainstalujte jej nejdříve podle příručky Začínáme se systémem REXYGEN pro příslušnou platformu [3].
Pro zpřístupnění dat z 1-Wire zařízení v systému REXYGEN a komunikaci s
nimi je potřeba nainstalovat jednak moduly owserver a ow-shell systému OWFS a 1-Wire
ovladač systému REXYGEN, což provedeme z příkazové řádky pomocí
příkazu:
Debian:
sudo apt-get install owserver ow-shell rex-owsdrvt
1.4.1 Zprovoznění 1Wire serveru
Modul owserver musí být nejdříve nakonfigurován dle typu použitého 1-Wire komunikačního rozhraní. Například pro I2C zařízení založené na čipu DS2482-100 nebo DS2482-800 by měl soubor /etc/owfs.conf vypadat následovně:
allow_other
server: port = localhost:4304
server: i2c = ALL:ALL
timeout_volatile = 2
Poznámka: soubor můžete editovat pomocí příkazu sudo nano /etc/owfs.conf.
Při použití USB převodníku (např. DS9490R) použijte:
allow_other
server: port = localhost:4304
server: usb = all
timeout_volatile = 2
Při použití Raspberry Pi GPIO pinů použijte:
allow_other
server: port = localhost:4304
server: w1
timeout_volatile = 2
Je také nutné povolit I2C a /ow komunikace (sudo raspi-config -> Zapnout I2C a 1-Wire).
Restartujte owserver a vypište detekovaná 1-Wire zařízení pomocí příkazu owdir. Výstup může vypadat zhruba takto:
/bus.1
/bus.0
/uncached
/settings
/system
/statistics
/structure
/simultaneous
/alarm
První řádek je ID 1-Wire zařízení (v tomto případě teplotní čidlo DS18B20).
Přečtěte teplotu pomocí příkazu :
owread /28.551DDF030000/temperature12
(ID změňte tak, aby odpovídalo vašemu čidlu).
Kapitola 2
Zařazení ovladače do projektu aplikace
Zařazení ovladače do projektu aplikace spočívá v přidání ovladače do hlavního souboru projektu a z připojení vstupů a výstupů ovladače v řídicích algoritmech.
2.1 Přidání ovladače OwsDrv do projektu
Přidání ovladače OwsDrv do hlavního souboru projektu je znázorněno na obr. 2.1.
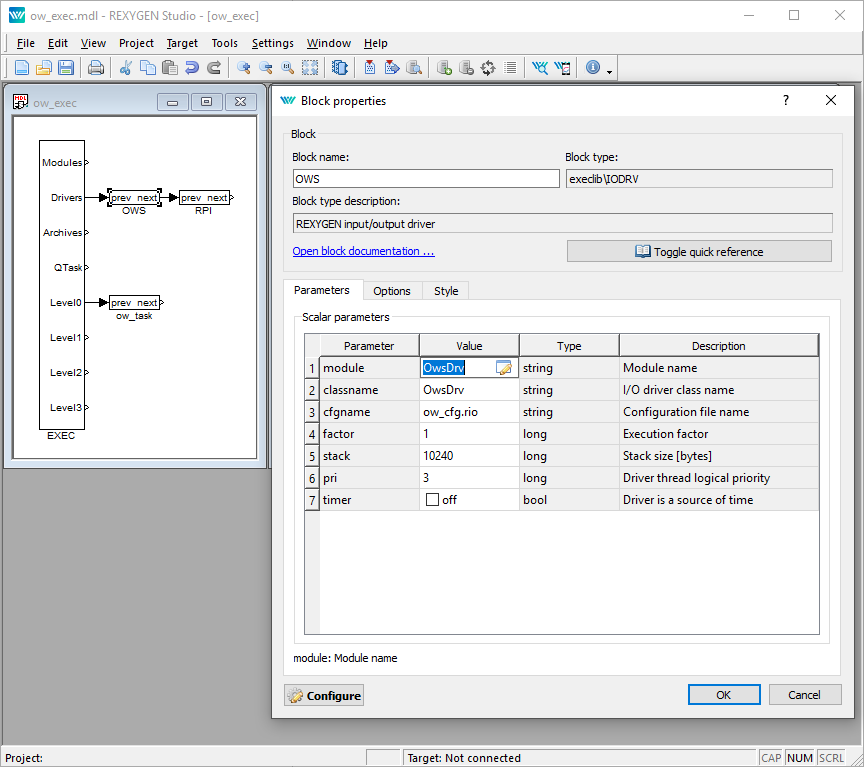
Pro zařazení ovladače do projektu slouží dva bloky. Nejprve je na výstup Modules bloku exekutivy EXEC připojen blok typu MODULE s názvem OwsDrv, který nemá žádné další parametry.
Druhý blok OWS typu IODRV, připojený na výstup exekutivy Drivers má tři nejdůležitější parametry:
- module – Jméno modulu, ke kterému se ovladač váže, v tomto případě OwsDrv. POZOR, jméno rozlišuje velká a malá písmena!
- classname – Jméno třídy ovladače, které je pro tento ovladač OwsDrv. POZOR, jméno rozlišuje velká a malá písmena!
- cfgname – Jméno konfiguračního souboru ovladače (*.rio, REXYGEN Input/Output). Jedná se o textový soubor, který se v případě potřeby vytvoří při prvním spuštění konfiguračního dialogu. Pojmenovat jej můžete libovolně (zde ow_cfg.rio). Pro další informace viz kapitolu 3.
Jménem tohoto bloku, na obr. 2.1 zadaným jako OWS, začínají názvy všech vstupních a výstupních signálů poskytovaných tímto ovladačem.
Právě popsané parametry bloku IODRV se konfigurují v programu REXYGEN Studio v dialogovém okně, které je rovněž ukázáno na obrázku 2.1.
2.2 Připojení vstupů a výstupů do řídicího algoritmu
Vstupy a výstupy z ovladačů se připojují do souborů s příponou .mdl jednotlivých úloh. V hlavním souboru projektu jsou soubory úloh uvedeny pouze odkazem v blocích typu QTASK nebo TASK připojovaných na výstupy QTask, Level0,…, Level3 exekutivy. Pro připojení vstupů a výstupů z ovladače OwsDrv do řídicího systému REXYGEN lze použít bloky, znázorněné na obr. 2.2.
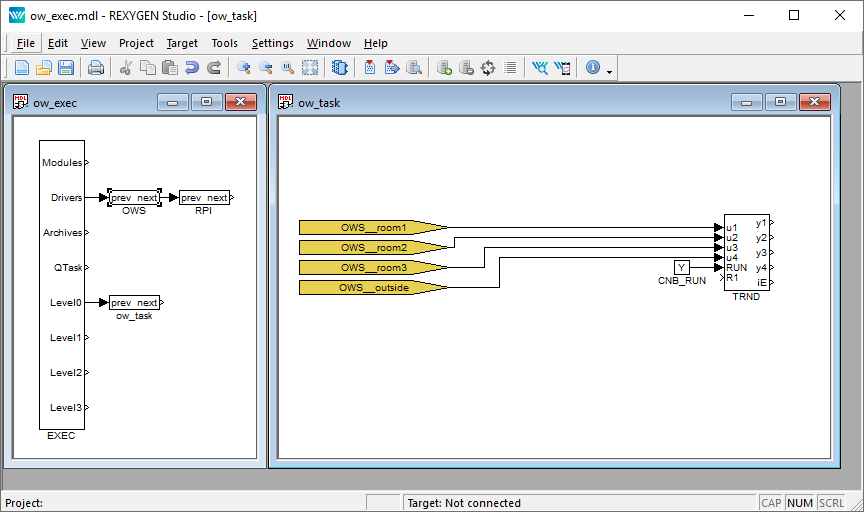
Blok typu From sloužící pro připojení jednoho vstupu má parametr Goto tag roven OWS__temperature, blok typu Goto používaný pro připojení jednoho výstupu by měl hodnotu parametru Goto tag rovnu OWS__jmeno. Všechny signály mají přímo na začátku svého jména prefix OWS následovaný dvěma znaky _ (podtržítko). Prefix (jméno bloku IODRV) může být libovolný, ale doporučuje se používat jméno modulu nebo třídy ovladače.
Kapitola 3
Konfigurace ovladače
V této kapitole je popsána konfigurace jednotlivých vstupních a výstupních signálů a jejich symbolické pojmenování. Signály jsou namapovány na jednotlivé proměnné OWFS serveru.
3.1 Konfigurační dialogové okno
Konfigurační dialogové okno znázorněné na obr. 3.1 je obsaženo v souboru OwsDrv_H.dll a aktivuje se v programu REXYGEN Studiostisknutím tlačítka Configure v parametrickém dialogu bloku typu IODRV s parametry ovladače OwsDrv (viz kap. 2).
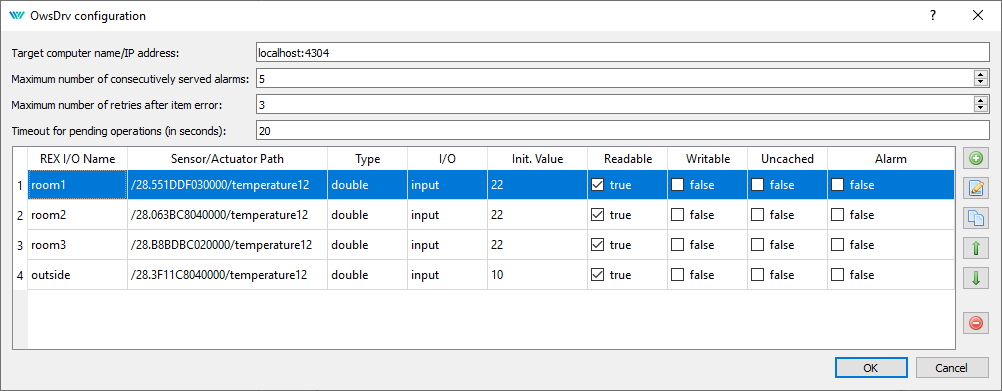
V horní části dialogu se definuje napojení na owserver. Program owserver typicky běží na stejném stroji jako RexCore, ale není to podmínkou.
Ve spodní části okna jsou definovány jednotlivé signály, které mohou být následně využity ke čtení nebo k zápisu v řídicím algoritmu systému REXYGEN. Jednoduše přidejte signály, použijte device ID, které vypsal příkaz owdir.
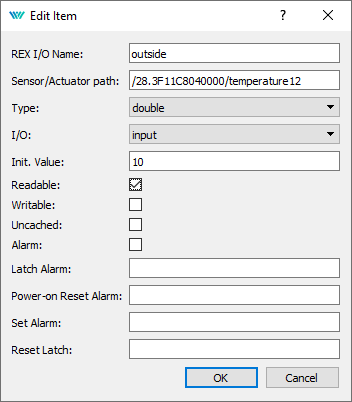
Signály lze přidávat nebo editovat po dvojkliku na dané položce přímo v parametrickém dialogu na obr. 3.1 nebo po stisku tlačítka Add nebo Edit v malém dialogu znázorněném na obr. 3.2.
Pokud je daný signál výstupem (ve sloupci I/O je vybrána hodnota output), je po spuštění systému tento výstup jednorázově nastaven na hodnotu Value, pokud tato hodnota není přepsána z řídicího algoritmu.
Při běhu řídicího systému se pro jednotlivé výstupní signály, označené v konfiguračním dialogu ve sloupci I/O jako výstupy (Output), cyklicky prochází tabulka signálů v pořadí uvedeném v tomto dialogu a pokud se signál od posledního zápisu změnil, zapíše se jeho nová hodnota. Obdobně, jednotlivé vstupní signály, označené v konfiguračním dialogu ve sloupci I/O jako vstupy (Input), se cyklicky čtou v témže pořadí. Při velkém množství zkonfigurovaných vstupů může přečtení celé tabulky trvat dost dlouhou dobu. Proto program owserver umožňuje indikovat změny signálů jako tzv. alarmy, v adresáři /alarm, viz sekci 3.2. Tento ovladač umožňuje s alarmy pracovat od verze 2.50 systému REXYGEN.
Je-li navíc označena volba Uncached, bude daný signál vždy čten z připojeného obvodu (např. z teploměru), není-li tato volba vybrána, bude vracen z vyrovnávací paměti (cache) owserveru, která se typicky aktualizuje jednou za 15 vteřin. Upozornění: Čím více signálů má zaškrtnutou volbu Uncached, tím pomalejší bude odezva tohoto ovladače.
Pro optimalizaci výkonnosti tohoto ovladače je dobré vědět, jak ovladač interně funguje. Hlavní smyčka tohoto ovladače spouštěná každou periodu ovladače vždy zpracovává nejvýše jeden požadavek na program owserver a po vyslání požadavku na owserver, nečeká na jeho okamžitou odpověď (tj. pokud data odpovědi nejsou k dispozici, snaží se je získat při dalším spuštění smyčky). Po inicializaci ovladače při spuštění exekutivy reálného času pracuje hlavní smyčka následovně:
- Zkontroluje, zda byl dokončen právě rozpracovaný požadavek (z předchozího volání této smyčky).
- Pokud ano, začne zpracovávat alarmy (detaily viz následující sekci).
- Pokud není žádný alarm zpracováván, snaží se zapsat jednu hodnotu výstupu z algoritmu.
- Pokud není zpracováván zápis hodnoty, snaží se přečíst jednu hodnotu vstupu do algoritmu.
Z uvedeného postupu je patrné, že nejvyšší důležitost (prioritu) má zpracování alarmů, potom zápis výstupních hodnot z algoritmu a naposledy čtení signálů. Při častém výskytu alarmů (což nemusí být normální stav) by se mohlo stát, že se nedostanou na řadu zápisy výstupů z algoritmu ani čtení ostatních hodnot. Proto lze v konfiguraci ovladače na obr. 3.1 nastavit nejvyšší počet po sobě obsloužených alarmů (Maximum number of consecutively served alarms), po němž se provede první z ostatních čekajících úkolů (zápis nebo čtení položky).
3.2 Využití alarmů programu owfs
Práce s alarmy patří mezi pokročilé techniky a vyžaduje dobrou znalost owfs a programu owserver. Alarmy doporučujeme použít teprve tehdy, když je odezva ovladače příliš dlouhá (pomalá).
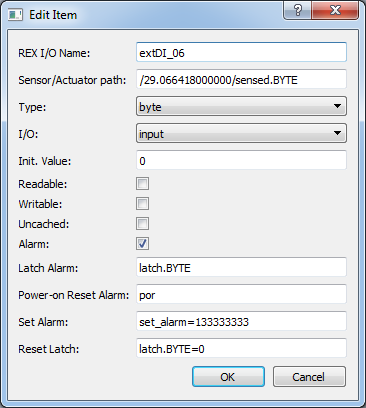
Konfigurace jednoho alarmu je pro případ 1-Wire zařízení založeného na obvodu DS2408 patrná z obr. 3.3. Cesta k signálu (Sensor/Actuator path) se zadává bez počáteční složky /alarm. Po volbě Alarm se zadávají další řetězce. Před spuštěním ovladače se zadané hodnoty předzpracují a uloží do pracovních proměnných pro každý alarm:
- sPath – cesta k zařízení, zde: /29.066418000000. Pro čtení nebo zápis hodnot se před tuto cestu může přidat adresář /alarm a za ni znak / a hodnota některého z řetězců uvedených v následujících položkách
- sSensed – soubor se čtenou hodnotou, zde: sensed.BYTE
- sLatch – soubor s příznakem změny, zde: latch.BYTE
- sAlarmPor – soubor indikující zapnutí napájení daného zařízení, zde: por
- sSet – soubor, do kterého se má zapsat hodnota, určující, kdy se bude alarm generovat (první část položky Set Alarm až ke znaku =), zde: set_alarm
- sSetVal – hodnota, která se má zapsat do souboru sSet (druhá část položky Set Alarm za znakem =), zde: 133333333
- sLatchRes – soubor, do kterého se má zapsat hodnota, určující, že byl alarm obsloužen (první část položky Reset Latch až ke znaku =), zde: latch.BYTE
- sLatchResVal – hodnota, která se má zapsat do souboru sLatchRes (druhá část položky Reset Latch za znakem =), zde: 0
Pro zpracování alarmů je v ovladači OwsDrv použit stavový automat s následujícími stavy:
- NOT_USED – V konfiguraci ovladače není uveden žádný alarm.
- INIT – Počáteční stav automatu.
- ALARM_DIR – Zjišťování obsahu adresáře /alarm.
- ALARM_PROCESS – Začátek zpracování každého alarmu.
- ALARM_POR_READ – Zjišťování zda dané zařízení neprovedlo svou inicializaci po zapnutí napájení (power-on reset) pomocí čtení souboru, jehož jméno je uloženo v řetězci sAlarmPor.
- ALARM_POR_READ_WAIT – Čekání na dokončení čtení zahájeného ve stavu ALARM_POR_READ.
- ALARM_SET – Nastavení generování alarmu na daném zařízení po zapnutí napájení. Do souboru, jehož jméno je určeno řetězcem sSet se zapíše hodnota řetězce sSetVal.
- ALARM_SET_WAIT – Čekání na dokončení zápisu zahájeného ve stavu ALARM_SET. Poté se začnou procházet všechny výstupy (Output). Pokud se najde výstup, jehož cesta začíná řetězcem sPath, zapíše se do příslušného souboru hodnota specifikovaná v položce Init. Value (viz obr. 3.3).
- ALARM_INIT_WRITE_WAIT – Čekání na dokončení každého jednotlivého zápisu počáteční hodnoty z předchozího stavu.
- ALARM_POR_RESET – Smazání příznaku inicializace po zapnutí napájení (power-on reset). Do souboru, jehož jméno je určeno řetězcem sAlarmPor, se zapíše hodnota 0.
- ALARM_POR_RESET_WAIT – Čekání na dokončení smazání příznaku inicializace po zapnutí napájení.
- ALARM_LATCH – Zjištění, zda dané zařízení indikuje výskyt alarmu. V tomto stavu se pošle příkaz na čtení obsahu souboru, jehož jméno je určeno řetězcem sLatch. Pokud je obsah nenulový nebo se v seznamu položek vyskytuje alespoň jedna nenulová, je zdetekován výskyt alarmu od posledního čtení.
- ALARM_LATCH_WAIT – Čekání na dokončení čtení zahájeného ve stavu ALARM_LATCH.
- ALARM_SENSED – Čtení hodnoty signálu po výskytu alarmu. Pokud byl zdetekován výskyt alarmu ve stavu ALARM_LATCH, zahájí se čtení souboru v adresáři /alarm, jehož jméno je určeno řetězcem sSensed.
- ALARM_SENSED_WAIT – Čekání na dokončení čtení zahájeného ve stavu ALARM_SENSED.
- ALARM_LATCH_RESET – Smazání příznaku výskytu alarmu. V tomto stavu se do souboru ve složce /alarm, jehož jméno je určeno řetězcem sLatchRes zapíše hodnota uložená v řetězci sLatchResVal.
- ALARM_LATCH_RESET_WAIT – Čekání na dokončení smazání příznaku výskytu alarmu zahájeného ve stavu ALARM_LATCH_RESET.
- SENSED – Čtení hodnoty signálu, který se mohl změnit ještě před smazáním příznaku výskytu alarmu ve stavu ALARM_LATCH_RESET. V tomto stavu se zahájí čtení obsahu souboru, jehož jméno je určeno řetězcem sSensed.
- SENSED_WAIT – Čekání na dokončení čtení zahájeného ve stavu SENSED.
- ALARM_BYPASS – Stav umožňující mezi obsluhou alarmů provést jeden zápis nebo čtení jiného signálu.
Přechody mezi jednotlivými stavy se řídí tabulkou 3.1. V prvním sloupci je uveden aktuální stav, ve druhém sloupci může být pro každý aktuální stav uvedena jedna nebo několik podmínek, ve třetím sloupci pak je uveden stav, do kterého automat přejde, pokud je splněna příslušná podmínka z druhého sloupce. Pro daný aktuální stav jsou podmínky vyhodnocovány shora dolů.
| Č. | Stav | Podmínky přechodu | Nový stav |
| -1 | NOT_USED | Při otvírání ovladače nalezen alespoň jeden alarm | INIT |
| 0 | INIT | Zahájení čtení adresáře /alarm | ALARM_DIR |
| 1 | ALARM_DIR | Při čtení adresáře /alarm se dojde na jeho konec | ALARM_PROCESS |
|
2 |
ALARM_PROCESS | Je-li již souvisle přečteno nMaxConsAlarms, pak | ALARM_BYPASS |
| Je-li souvisle přečteno méně než nMaxConsAlarms, pak | ALARM_POR_READ | ||
| Na konci cyklu alarmů se přiřadí iAlarmPos = -1. Pak | ALARM_BYPASS | ||
|
3 |
ALARM_POR_READ | Není-li sAlarmPor definován, pak další alarm | ALARM_PROCESS |
| Je-li sAlarmPor prázdný, pak | ALARM_LATCH | ||
| Po úspěšném přečtení sAlarmPor | ALARM_POR_READ_WAIT | ||
|
4 |
ALARM_POR_READ_WAIT | Je-li proměnná por různá od nuly | ALARM_SET |
| Není-li proměnná por různá od nuly | ALARM_LATCH | ||
|
5 |
ALARM_SET | Není-li sSet nebo sSetVal definován, pak další alarm | ALARM_PROCESS |
| Je-li sSet nebo sSetVal prázdný, pak | ALARM_POR_RESET | ||
| iAlarmInitPos = -1; Po úspěšném zápisu pak | ALARM_SET_WAIT | ||
|
6 |
ALARM_SET_WAIT | Procházení iAlarmInitPos. Pro nalezené zápisy pak | ALARM_INIT_WRITE_WAIT |
| Na konci iAlarmInitPos = -1; pak | ALARM_POR_RESET | ||
|
7 |
ALARM_INIT_WRITE_WAIT | Pokud je iAlarmInitPos < 0, pak | ALARM_POR_RESET |
| Jinak | ALARM_SET_WAIT | ||
|
8 |
ALARM_POR_RESET | Není-li sAlarmPor definován, pak další alarm | ALARM_PROCESS |
| Je-li sAlarmPor prázdný, pak | ALARM_LATCH | ||
| Po úspěšném zápisu | ALARM_POR_RESET_WAIT | ||
| 9 | ALARM_POR_RESET_WAIT | Po dokončení požadavku | ALARM_LATCH |
|
10 |
ALARM_LATCH | Není-li sLatch definován nebo je prázdný, pak další alarm | ALARM_PROCESS |
| Po úspěšném přečtení | ALARM_LATCH_WAIT | ||
|
11 |
ALARM_LATCH_WAIT | Je-li proměnná latch různá od nuly, pak | ALARM_SENSED |
| Jinak další alarm | ALARM_PROCESS | ||
|
12 |
ALARM_SENSED | Není-li sSensed definován, pak další alarm | ALARM_PROCESS |
| Je-li sSensed prázdný, pak | ALARM_LATCH_RESET | ||
| Po úspěšném přečtení | ALARM_SENSED_WAIT | ||
| 13 | ALARM_SENSED_WAIT | Po dokončení požadavku | ALARM_LATCH_RESET |
|
14 |
ALARM_LATCH_RESET | Není-li sLatchRes nebo sLatchResVal definován, pak | ALARM_PROCESS |
| Je-li sLatchRes nebo sLatchResVal prázdný, pak | SENSED | ||
| Po úspěšném zápisu | ALARM_LATCH_RESET_WAIT | ||
| 15 | ALARM_LATCH_RESET_WAIT | Po dokončení požadavku | SENSED |
|
16 |
SENSED | Není-li sSensed definován nebo je prázdný, pak další alarm | ALARM_PROCESS |
| Po úspěšném přečtení | SENSED_WAIT | ||
| 17 | SENSED_WAIT | Po dokončení požadavku | ALARM_PROCESS |
|
18 |
ALARM_BYPASS | Je-li iAlarmPos >= 0, pak další alarm | ALARM_PROCESS |
| Jinak pokračuj od začátku | INIT | ||
3.3 Speciální signály
V některých speciálních případech se ukazuje jako užitečné/nutné mít přístup k stavovým nebo konfiguračním proměnným driveru. Níže popsané signály označené písmenem R (W) jsou určeny pro čtení (zápis), tj. jedná se o vstupy (výstupy) řídicího systému.
Vlastní ovladač má tyto speciální signály:
| _DGNRESET | W | reset (smazání) akumulovaných diagnostických informací |
| _TRANSACTIONS | R | celkový počet transakcí s programem owserver |
| _RECONNECTS | R | počet opakovaných navázání spojení (po chybě komunikace) |
Všechny globální signály začínají znakem _ (podtržítko). Vzhledem k oddělení označení ovladače od názvu signálu pomocí dvou znaků _, budou se v tomto případě vyskytovat za sebou tři znaky _, např. OWS___DGNRESET.
Dále ke každému signálu lze přidat za jméno speciální text, který značí, že se nepracuje s vlastní hodnotou, ale s jejím atributem. Texty jsou následující (všechny začínají znakem _):
| _Value | RW | vlastní hodnota signálu (tj. stejná, jako název bez speciální přípony) |
| _DGNRESET | W | reset diagnostických informací pro daný signál |
| _TRANSACTIONS | R | počet transakcí s programem owserver pro daný signál |
| _ReadEnable | RW | povolení čtení signálu; ekvivalent: _RE |
| _WriteEnable | RW | povolení zápisu signálu; ekvivalent: _WE |
| _WriteOneShot | W | jednorázový zápis signálu; ekvivalent: _WOS |
| _Alarm | R | příznak vzniku alarmu na daném signálu; přečtením se smaže |
| _PerFactor | R | násobek periody ovladače pro aktualizaci signálu |
| _PerCount | R | počet period ovladače od poslední aktualizace signálu |
| _PerMax | R | maximální počet period od aktualizace signálu |
| _PendCount | R | aktuální počet cyklů po které se čeká na vrácení hodnoty z programu owserver |
| _PendLast | R | poslední počet cyklů po které se čekalo na vrácení hodnoty z programu owserver |
| _PendMax | R | maximální počet cyklů po které se čekalo na vrácení hodnoty z programu owserver |
| _Period | R | perioda aktualizace signálu v sekundách |
| _Age | R | doba uplynulá od poslední aktualizace signálu (stáří signálu) |
| _AgeMax | R | nejvyšší stáří signálu od posledního resetu diagnostických informací |
Kapitola 4
Co dělat při problémech
V případě, že v diagnostických prostředcích systému REXYGEN (např. Watch režimu programu REXYGEN Studio) jsou neočekávané nebo nesprávné hodnoty vstupů nebo výstupů, je vhodné nejdříve ověřit jejich funkci nezávisle na systému REXYGEN. Dále je nutné překontrolovat konfiguraci. Nejčastější chyby jsou:
- Chyba v hardware - špatné zapojení
- Nejsou nataženy moduly jádra pro I2C nebo USB zařízení
- Nesprávné device ID
- Příliš dlouhá perioda úlohy, která čte signály z OwsDrv (v systémovém logu se pravidelně objevuje chyba Socket Error). Pak je třeba zvětšit timeout programu owserver parametrem příkazového řádku --timeout_server=60 (timeout zvětšen na 60 vteřin)
V případě, že daný vstup či výstup funguje pomocí jiných softwarových nástrojů správně a při shodném zapojení v systému REXYGEN nefunguje, prosíme o zaslání informace o problému (nejlépe elektronickou cestou) na adresu dodavatele. Pro co nejrychlejší vyřešení problému by informace by měla obsahovat:
- Identifikační údaje Vaší instalace vyexportované pomocí programu REXYGEN Studio (Target Licensing Export).
- Stručný a výstižný popis problému.
- Co možná nejvíce zjednodušenou konfiguraci řídicího systému REXYGEN, ve které se problém vyskytuje (ve formátu souboru s příponou .mdl).
Literatura
[1] Maxim Integrated. 1-Wire Application Notes. http://www.maximintegrated.com, 2013.
[2] Paul Alfille. OWFS 1-Wire Filesystem. http://www.owfs.org, 2013.
[3] REX Controls s.r.o.. Začínáme se systémem REXYGEN na platformě Raspberry Pi, 2020. .
Referenční číslo dokumentace: 15831
2023 © REX Controls s.r.o., www.rexygen.com