MC_CamIn, MCP_CamIn – Engage the cam
Block SymbolsLicensing group: MOTION CONTROL

Function Description
The MC_CamIn and MCP_CamIn blocks offer the same functionality, the only difference
is that some of the inputs are available as parameters in the MCP_ version of the
block.
The MC_CamIn block switches on a mode in which the slave axis is commanded to position which corresponds to the position of master axis transformed with with a function defined by the MCP_CamTableSelect block (connected to CamTableID input). Denoting the transformation as , master axis position and slave axis position , we obtain (for absolute relationship, without phasing): . This form of synchronized motion of the slave axis is called electronic cam.
The cam mode is switched off by executing other motion block on slave axis with mode aborting or by executing a MC_CamOut block. The cam mode is also finished when the master axis leaves a non-periodic cam profile. This situation is indicated by the EndOfProfile output.
In case of a difference between real position and/or velocity of slave axis and cam-profile slave axis position and velocity, some transient trajectory must be generated to cancel this offset. This mode is called ramp-in. The ramp-in function is added to the cam profile to eliminate the difference in start position. The RampIn parametr is an average velocity of the ramp-in function. Ramp-in path is not generated for RampIn=0 and error -707 (position or velocity step) is invoked if some difference is detected. Recommended value for the RampIn parametr is 0.1 to 0.5 of maximal slave axis velocity. The parameter has to be lowered if maximal velocity or acceleration error is detected.
Inputs
uMaster | Master axis reference | Reference |
uSlave | Slave axis reference | Reference |
CamTableID | Cam table reference (connect to MCP_CamTableSelect.CamTableID) | Reference |
Execute | The block is activated on rising edge | Bool |
MasterOffset | Offset in cam table on master side [unit] | Double (F64) |
SlaveOffset | Offset in cam table on slave side [unit] | Double (F64) |
MasterScaling | Overall scaling factor in cam table on master side | Double (F64) |
SlaveScaling | Overall scaling factor in cam table on slave side | Double (F64) |
StartMode | Select relative or absolute cam table | Long (I32) |
|
|
|
BufferMode | Buffering mode | Long (I32) |
|
|
|
RampIn | RampIn factor (0 = RampIn mode not used); average additive velocity (absolute value) during ramp-in process | Double (F64) |
Outputs
yMaster | Master axis reference | Reference |
ySlave | Slave axis reference | Reference |
InSync | Slave axis reached the cam profile | Bool |
CommandAborted | Algorithm was aborted | Bool |
Busy | Algorithm not finished yet | Bool |
Active | The block is controlling the axis | Bool |
Error | Error occurred | Bool |
ErrorID | Result of the last operation | Error |
|
|
|
EndOfProfile | Indicate end of cam profile ( not periodic cam only) | Bool |
SyncDistance | Position deviation of the slave axis from synchronized position | Double (F64) |
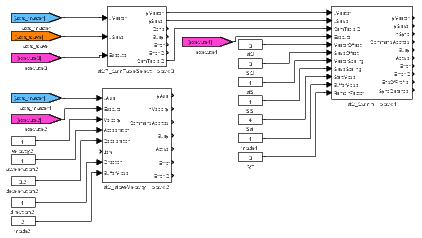
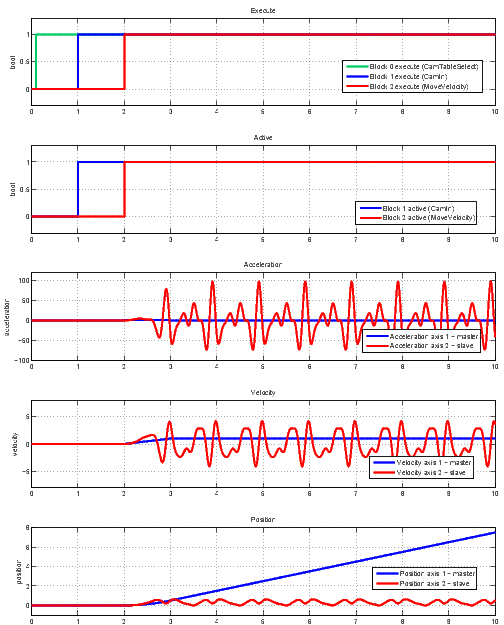
Example
[Previous] [Back to top] [Up] [Next]
2024 © REX Controls s.r.o., www.rexygen.com