MC_TorqueControl, MCP_TorqueControl – Torque/force control
Block SymbolsLicensing group: MOTION CONTROL

Function Description
The MC_TorqueControl and MCP_TorqueControl blocks offer the same functionality, the
only difference is that some of the inputs are available as parameters in the MCP_ version of the
block.
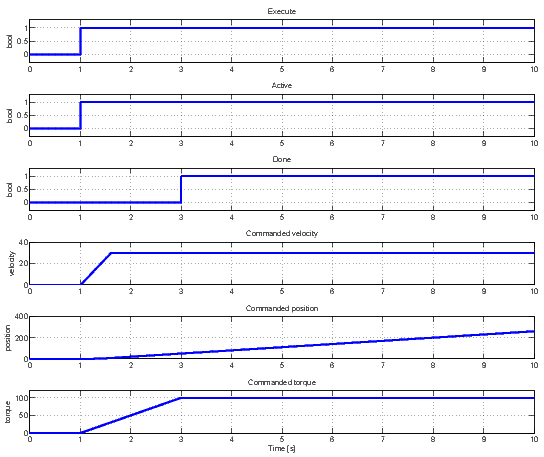
The MCP_TorqueControl block generates constant slope torque/force ramp until maximum requested value has been reached. Similar profile is generated for velocity. The motion trajectory is limited by maximum velocity, acceleration / deceleration, and jerk, or by the value of the torque, depending on the mechanical circumstances.
Inputs
uAxis | Axis reference (only RM_Axis.axisRef–uAxis or yAxis–uAxis connections are allowed) | Reference |
Execute | The block is activated on rising edge | Bool |
Torque | Maximal allowed torque/force | Double (F64) |
TorqueRamp | Maximal allowed torque/force ramp | Double (F64) |
Velocity | Maximal allowed velocity [unit/s] | Double (F64) |
Acceleration | Maximal allowed acceleration [unit/s] | Double (F64) |
Deceleration | Maximal allowed deceleration [uunit/s] | Double (F64) |
Jerk | Maximal allowed jerk [unit/s] | Double (F64) |
Direction | Direction of movement (cyclic axis or special case only) | Long (I32) |
|
|
|
BufferMode | Buffering mode | Long (I32) |
|
|
|
Outputs
yAxis | Axis reference (only RM_Axis.axisRef–uAxis or yAxis–uAxis connections are allowed) | Reference |
InTorque | Requested torque/force is reached | Bool |
CommandAborted | Algorithm was aborted | Bool |
Busy | Algorithm not finished yet | Bool |
Active | The block is controlling the axis | Bool |
Error | Error occurred | Bool |
ErrorID | Result of the last operation | Error |
|
|
|
Parameter
kma | Torque/force to acceleration ratio | Double (F64) |
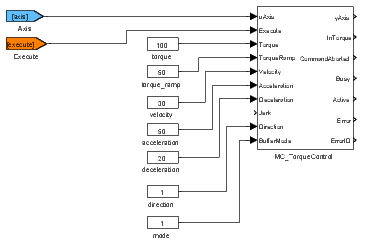
Example
[Previous] [Back to top] [Up] [Next]
2024 © REX Controls s.r.o., www.rexygen.com