MC_TorqueControl, MCP_TorqueControl – Řízení síly/momentu
Symboly blokůPotřebná licence: MOTION CONTROL

Popis funkce
Bloky MC_TorqueControl a MCP_TorqueControl mají naprosto shodnou funkci, jediným
rozdílem je, že MCP_ varianta bloku má méně vstupů a potřebné konstanty se zadávají
jako parametry bloku.
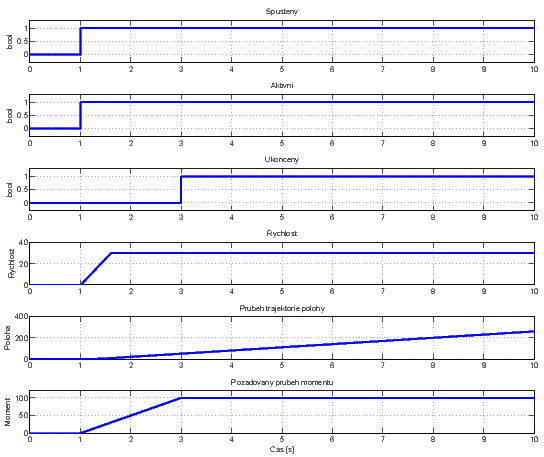
Blok MC_TorqueControl generuje požadovaný moment/sílu nejprve s konstantním nárůstem (parametr TorqueRamp) a po dosažení maximální hodnoty (parametr Torque) je již moment/síla konstantní. Pohyb osy je řízen podle požadovaného momentu tak, aby nebyly překročeny maximální hodnoty rychlosti, zrychlení/zpomalení a případně jerku.
Vstupy
uAxis | Odkaz na osu (přípustné je jen spojení RM_Axis.axisRef–uAxis nebo yAxis–uAxis) | Reference |
Execute | Náběžná hrana aktivuje blok | Bool |
Torque | Maximální povolený moment/síla | Double (F64) |
TorqueRamp | Maximální povolená změna momentu/síly | Double (F64) |
Velocity | Maximální povolená rychlost [unit/s] | Double (F64) |
Acceleration | Maximální povolené zrychlení [unit/s] | Double (F64) |
Deceleration | Maximální povolené zpomalení [uunit/s] | Double (F64) |
Jerk | Maximální povolená změna zrychlení [unit/s] | Double (F64) |
Direction | Směr pohybu (jen pro cyklické osy nebo speciální případy) | Long (I32) |
|
|
|
BufferMode | Režim převzetí osy | Long (I32) |
|
|
|
Výstupy
yAxis | Odkaz na osu (přípustné je jen spojení RM_Axis.axisRef–uAxis nebo yAxis–uAxis) | Reference |
InTorque | Příznak dosažení požadovaného momentu/síly | Bool |
CommandAborted | Příznak přerušení funkce bloku | Bool |
Busy | Příznak, že algoritmus ještě neskončil | Bool |
Active | Příznak, že blok řídí osu | Bool |
Error | Příznak chyby | Bool |
ErrorID | Výsledek poslední operace | Error |
|
|
|
Parametr
kma | Poměr mezi sílou/momentem a zrychlením | Double (F64) |
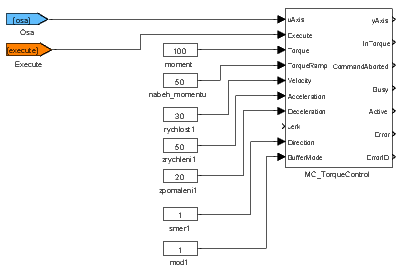
Příklad
[Předchozí] [Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com