MC_MoveLinearRelative, MCP_MoveLinearRelative – Pohyb do pozice po přímkách (relativní souřadnice)
Symboly blokůPotřebná licence: COORDINATED MOTION

Popis funkce
Bloky MC_MoveLinearRelative a MCP_MoveLinearRelative mají naprosto shodnou
funkci, jediným rozdílem je, že MCP_ varianta bloku má méně vstupů a potřebné
konstanty se zadávají jako parametry bloku.
Blok MC_MoveLinearAbsolute slouží pro přesun koncového efektoru po přímce na zadanou pozici. Pozice se zadává relativně od aktuální polohy v souřadném systému zvoleném vstupem CoordSystem. Parametry Velocity, Acceleration, Deceleration a Jerk určují rychlost, zrychlení, zpomalení a změnu zrychlení ve směru pohybu (tj. tečně k trajektoriji). Pro určení těchto parametrů se vychází při použití souřadného systému MCS nebo PCS jen z polohových souřadnic. Další souřadnice (úhel natočení) se již generují proporcionálně, tak aby byl pohyb v těchto souřadnicích lineární a skončil ve stejném okamžiku jako polohové souřadnice. Pokud se poloha nemění (dochází tedy jen k otočení koncového efektoru), počítá se rychlost/zrychlení ze všech souřadnic, ale číslo má pak jiný fyzikální význam. Cílovou polohu určuje vektorový parametr Distance. Tento parametr musí mít tolik prvků, kolik je nastaveno souřadnic v přidruženém bloku RM_GroupAxes. V opačném případě je signalizována chyba a pohyb se neprovede. Pohyb je spuštěn náběžnou hranou na vstupu Execute.
Vstupy
uAxesGroup | Odkaz na skupinu os | Reference |
Execute | Náběžná hrana aktivuje blok | Bool |
Distance | Pole souřadnic (relativních pozic a orientací) | Reference |
Velocity | Maximální povolená rychlost [unit/s] | Double (F64) |
Acceleration | Maximální povolené zrychlení [unit/s] | Double (F64) |
Jerk | Maximální povolená změna zrychlení [unit/s] | Double (F64) |
CoordSystem | Volba souřadného systému | Long (I32) |
|
|
|
BufferMode | Režim převzetí osy | Long (I32) |
|
|
|
TransitionMode | Režim míchání pohybu | Long (I32) |
|
|
|
TransitionParameter | Parametr pro navázání pohybu (dle zvoleného režimu míchání) | Double (F64) |
Výstupy
yAxesGroup | Odkaz na skupinu os | Reference |
Done | Příznak dokončení algoritmu | Bool |
CommandAborted | Příznak přerušení funkce bloku | Bool |
Busy | Příznak, že algoritmus ještě neskončil | Bool |
Active | Příznak, že blok řídí osu | Bool |
Error | Příznak chyby | Bool |
ErrorID | Výsledek poslední operace | Error |
|
|
|
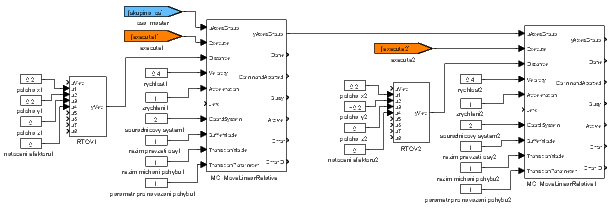
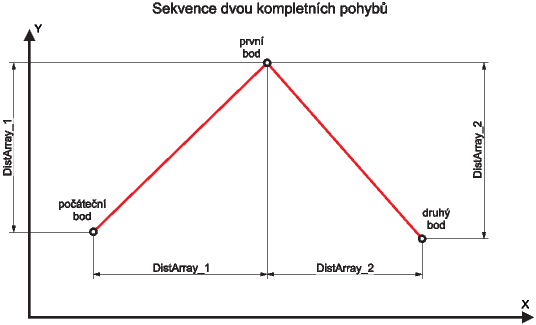
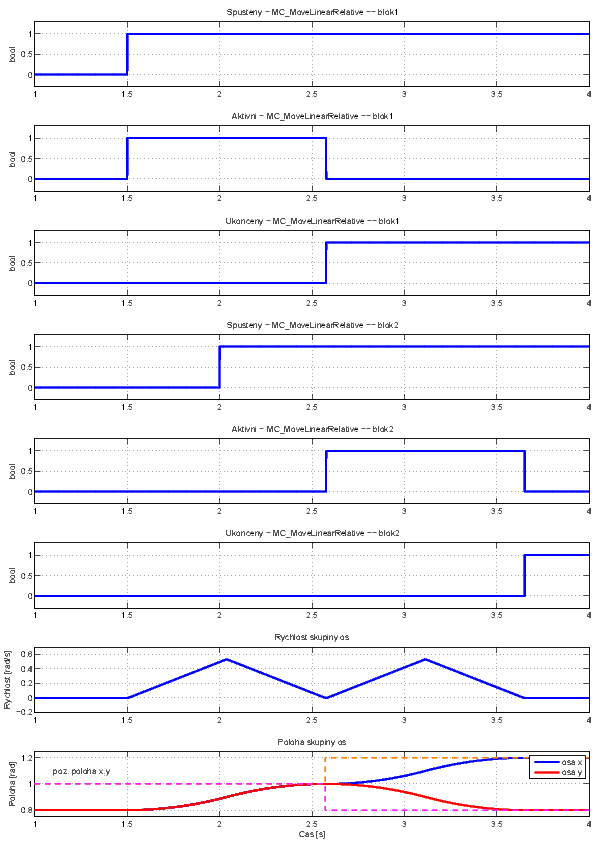
Příklad
[Předchozí] [Na začátek] [Výše] [Další]
2020 © REX Controls s.r.o., www.rexygen.com