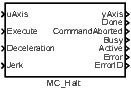
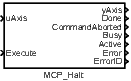
MC_Halt, MCP_Halt – Stopping a movement (interruptible)
Block SymbolsLicensing group: MOTION CONTROL
Function Description
The MC_Halt and MCP_Halt blocks offer the same functionality, the only difference
is that some of the inputs are available as parameters in the MCP_ version of the
block.
The MC_Halt block commands a controlled motion stop and transfers the axis to the state DiscreteMotion. After the axis has reached zero velocity, the Done output is set to true immediately and the axis state is changed to Standstill.
Note 1: Block MC_Halt is intended for temporary stop of an axis under normal working conditions. Any next motion command which cancels the MC_Halt can be executed in nonbuffered mode (opposite to MC_Stop, which cannot be interrupted). The new command can start even before the stopping sequence was finished.
Inputs
uAxis | Axis reference (only RM_Axis.axisRef–uAxis or yAxis–uAxis connections are allowed) | Reference |
Execute | The block is activated on rising edge | Bool |
Deceleration | Maximal allowed deceleration [unit/s] | Double (F64) |
Jerk | Maximal allowed jerk [unit/s] | Double (F64) |
Outputs
yAxis | Axis reference (only RM_Axis.axisRef–uAxis or yAxis–uAxis connections are allowed) | Reference |
Done | Algorithm finished | Bool |
CommandAborted | Algorithm was aborted | Bool |
Busy | Algorithm not finished yet | Bool |
Active | The block is controlling the axis | Bool |
Error | Error occurred | Bool |
ErrorID | Result of the last operation | Error |
|
|
|
[Previous] [Back to top] [Up] [Next]
2020 © REX Controls s.r.o., www.rexygen.com