MC_PhasingAbsolute, MCP_PhasingAbsolute – Vytvoření fázového posunu (absolutní souřadnice)
Symboly blokůPotřebná licence: MOTION CONTROL

Popis funkce
Bloky MC_PhasingAbsolute a MCP_PhasingAbsolute mají naprosto shodnou funkci,
jediným rozdílem je, že MCP_ varianta bloku má méně vstupů a potřebné konstanty se
zadávají jako parametry bloku.
Blok MC_PhasingAbsolute zavádí další posunutí na hlavní ose pro vačku (blok MC_CamIn) a převodovku (blok MC_GearIn). Blok funguje velice podobně bloku MC_MoveSuperimposed (tj. generuje pohyb z bodu 0 do bodu PhaseShift s respektováním omezení na rychlost, zrychlení a popřípadě jerk, tak aby pohyb trval co nejkratší dobu) s tím rozdílem, že generovaná poloha/rychlost/zrychlení se nepřičítá ke skutečné poloze hlavní osy, ale přičítá se k ní jen z pohledu bloku MC_CamIn, MC_GearIn, MC_GearInPos, MC_CombineAxis.
Poznámka 1: Tento blok je analogie natočení mechanické vačky na hřídeli o úhel PhaseShift.
Poznámka 2: Pokud již na ose nějaké fázové posunutí je, tak hodnota PhaseShift je výsledné posunutí. Fázové posunutí se nuluje, pokud (slave) osa přejde do stavu disabled nebo je spuštěn další pohyb v režimu aborting.
Vstupy
uMaster | Odkaz na hlavní osu | Reference |
uSlave | Odkaz na podřízenou osu | Reference |
Execute | Náběžná hrana aktivuje blok | Bool |
PhaseShift | Požadovaný fázový posuv (vzdálenost na hlavní ose) vačky | Double (F64) |
Velocity | Maximální povolená rychlost [unit/s] | Double (F64) |
Acceleration | Maximální povolené zrychlení [unit/s] | Double (F64) |
Deceleration | Maximální povolené zpomalení [unit/s] | Double (F64) |
Jerk | Maximální povolená změna zrychlení [unit/s] | Double (F64) |
BufferMode | Režim převzetí osy | Long (I32) |
|
|
|
Výstupy
yMaster | Odkaz na hlavní osu | Reference |
ySlave | Odkaz na podřízenou osu | Reference |
Done | Příznak dokončení algoritmu | Bool |
CommandAborted | Příznak přerušení funkce bloku | Bool |
Busy | Příznak, že algoritmus ještě neskončil | Bool |
Active | Příznak, že blok řídí osu | Bool |
Error | Příznak chyby | Bool |
ErrorID | Výsledek poslední operace | Error |
|
|
|
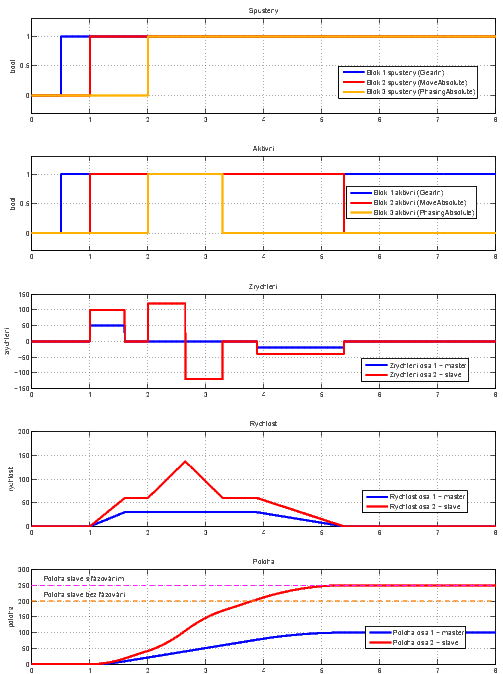
Příklad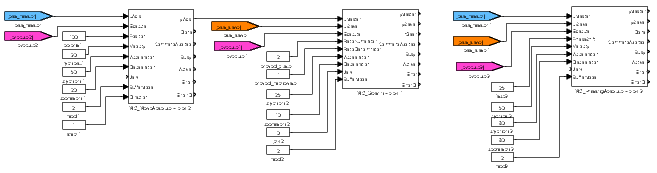
[Předchozí] [Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com