SC2FA – Stavový regulátor systému 2. řádu s autotunerem
Symbol blokuPotřebná licence: AUTOTUNING

Popis funkce
Funkční blok SC2FA realizuje stavový regulátor pro systém druhého řádu
(7.4) s frekvenčním autotunerem. Je vhodný především pro aktivní
řízení (zatlumení) kmitavých systémů s velmi slabým tlumením
().
Může však být použit též jako samonastavující se regulátor pro libovolný
systém, který lze s dostatečnou přesností popsat přenosem ve tvaru
| (7.4) |
kde je přirozená
(netlumená) frekvence, ,
, je koeficient
tlumení a ,
jsou
libovolná reálná čísla. Blok pracuje ve dvou režimech, v režimu Identifikace a
návrhu a v režimu Regulace.
Režim „Identifikace a návrhu“ ze zapíná nastavením binárního vstupu . Vlastní proces identifikace a návrhu se spouští náběžnou hranou vstupu RUN. Na výstupu bloku mv se poté objeví budící harmonický signál se stejnoměrnou složkou ubias, amplitudou uamp a frekvencí postupně probíhající interval . Aktuální frekvence je přitom kopírována na výstup w. Rychlost změny (rozmítání) frekvence je dána parametrem cp, který udává relativní zmenšení počáteční periody budící sinusovky za čas , tedy
| (7.5) |
Hodnota parametru cp se obvykle pohybuje v intervalu
.
Čím menší je koeficient tlumení řízeného systému, tím více se musí cp
blížit k jedné.
Identifikace systému se spouští náběžnou hranou vstupu RUN zároveň s generátorem budícího signálu se startovací frekvencí . Po uplynutí stime se startuje výpočet odhadu aktuálního bodu frekvenční charakteristiky. Jeho reálná a imaginární část se průběžně kopíruje po řadě na výstupy xre a xim. Je-li parametr bloku MANF nastaven na 0, potom se v procesu identifikace dvakrát zastaví rozmítání frekvence na dobu stime a to v okamžicích, kdy jsou poprvé dosaženy body s fázovým zpožděním ph1 a ph2. Přednastavené hodnoty parametrů ph1 a ph2 jsou po řadě a a mohou být změněny na libovolné hodnoty v intervalu , přičemž . Po uplynutí stime sekund při zastavení ve fázi ph1, resp. ph2 se spočítá průměr posledních iavg naměřených bodů (průměrováním tedy získáme odhad příslušného bodu frekvenční charakteristiky) pro následný výpočet parametrického modelu ve tvaru (7.4). Je-li , potom je možné provést „navzorkování“ dvou bodů frekvenční charakteristiky ručně pomocí vstupu HLD. Vstup zastaví rozmítání frekvence a opětovné nastavení vede k jeho pokračování. Ostatní funkce jsou identické.
V případě potřeby je možné proces identifikace přerušit vstupem . Jsou-li již v tomto okamžiku oba dva body pro parametrickou identifikaci určeny, pokračuje se v návrhu regulátoru normálním způsobem. V opačném případě je proces ukončen bez návrhu regulátoru a výstup signalizuje chybu.
Během vlastní „identifikace a návrhu“ je výstup IDBSY nastaven na 1. Po skončení je shozen na 0. Při bezchybném návrhu regulátoru je výstup a výstup iIDE signalizuje jednotlivé fáze identifikačního experimentu. Přibližování k prvnímu bodu je , zastavení v prvním bodě , přibližování k druhému bodu je , zastavení v druhém bodě a poslední fáze po zastavení v druhém bodě je . Jestliže identifikace skončí s chybou, pak je a číslo na výstupu iIDE specifikuje příslušnou chybu.
Vypočtené parametry stavového regulátoru jsou instalovány okamžitě do
algoritmu řízení, jestliže vstup SETC je trvale nastaven na on. V opačném
případě se provede nastavení parametrů až po ukončení návrhu na
náběžnou hranu vstupu SETC. Výsledky parametrické identifikace a návrhu
stavového regulátoru je možné získat na výstupech p1, p2, …, p6 vhodným
nastavením vstupu ips. Náběžná hrana na vstupu MFR po skončení identifikace
()
odstartuje generování frekvenční charakteristiky získaného parametrického modelu
na výstupech w, xre, xim. Takto je možno porovnat její průběh s „přímo
odměřenou“ frekvenční charakteristikou systému.
V režimu „regulace“ (binární vstup ) může regulátor pracovat v manuálním módu () nebo v automatickém módu. Jestliže je blok regulátoru spuštěn (při studeném startu) s hodnotou vstupu , potom se předpokládá, že zadané parametry bloku mb0, mb1, ma0 a ma1 odpovídají dříve určeným koeficientům , , a přenosu řízeného systému a automaticky proběhne návrh stavového regulátoru. Je-li regulátor navíc v automatickém módu a , potom zákon řízení od počátku využívá nově navržené parametry. Takto lze vypustit identifikaci při opakovaném spuštění bloku.
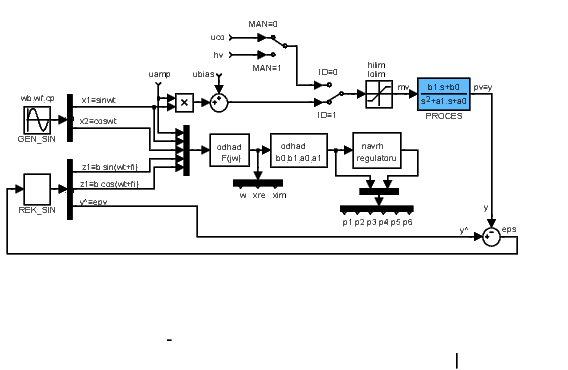
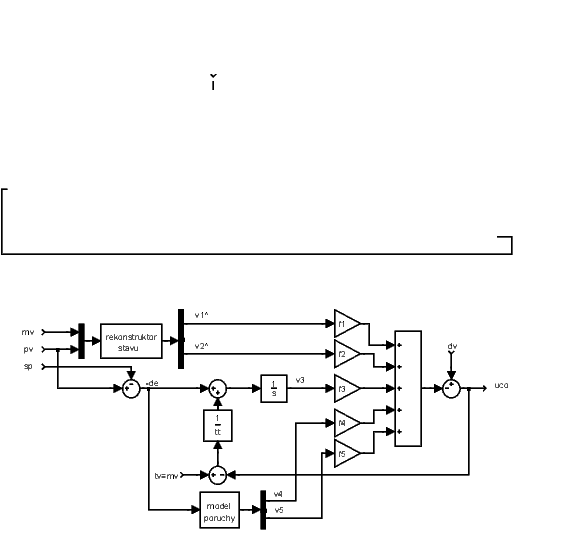
Na výše uvedeném obrázku je zjednodušené vnitřní schéma samonastavujícího se stavového regulátoru, část frekvenční identifikace. Na spodním obrázku je stavová zpětná vazba s rekonstruktorem stavu a ošetřením unášení integrační složky. Na obrázku není znázorněna skutečnost, že blok návrhu regulátoru v části frekvenční identifikace automaticky nastaví parametry rekonstruktoru stavu a koeficienty f1, f2, …, f5 stavové zpětné vazby.
Model řízeného systému je brán jako systém 2. řádu s přenosem ve tvaru (7.4). Jednoduchými úpravami lze dojít k přenosům
| (7.6) |
a
| (7.7) |
Parametry těchto přenosů je možné po skončení identifikace přečíst z výstupů p1,…,p6. Význam těchto výstupů se mění při změně vstupu ips, avšak pouze pokud neběží identifikace (tedy ).
Vstupy
dv | Proměnná dopředné vazby | Double (F64) |
sp | Požadovaná hodnota (setpoint) | Double (F64) |
pv | Řízená veličina | Double (F64) |
tv | Veličina pro vysledování | Double (F64) |
hv | Hodnota výstupu v manuálním režimu | Double (F64) |
MAN | Manuální nebo automatický režim | Bool |
|
|
|
ID | Režim identifikace nebo regulace | Bool |
|
|
|
TUNE | Zahájení ladicího experimentu, start generátor harmonického budicího signálu (offon) | Bool |
HLD | Zastavení rozmítání frekvence | Bool |
BRK | Signál pro přerušení identifikačního experimentu | Bool |
SETC | Přijmutí a nastavení parametrů regulátoru | Bool |
|
|
|
ips | Význam výstupních signálů | Long (I32) |
|
|
|
MFR | Generování frekvenční charakteristiky modelu na výstupy w, xre a xim (offon spouští generování) | Bool |
Výstupy
mv | Akční zásah regulátoru (manipulated variable) | Double (F64) |
de | Regulační odchylka | Double (F64) |
SAT | Saturace | Bool |
|
|
|
IDBSY | Příznak probíhající identifikace | Bool |
|
|
|
w | Odhad bodu frekvenční charakteristiky - frekvence v rad/s | Double (F64) |
xre | Odhad bodu frekvenční charakteristiky - reálná část | Double (F64) |
xim | Odhad bodu frekvenční charakteristiky - imaginární část | Double (F64) |
epv | Rekonstruovaný signál pv (pro účely ručního ladění rekonstruktoru) | Double (F64) |
IDE | Příznak chyby identifikace | Bool |
|
|
|
iIDE | Kód chyby | Long (I32) |
|
|
|
p1..p6 | Výsledky identifikace a návrhu regulátoru | Double (F64) |
Parametry
ubias | Stejnosměrná složka budicího harmonického signálu | Double (F64) |
uamp | Amplituda budicího harmonického signálu 1.0 | Double (F64) |
wb | Počátek frekvenčního intervalu [rad/s] 1.0 | Double (F64) |
wf | Konec frekvenčního intervalu [rad/s] 10.0 | Double (F64) |
isweep | Způsob rozmítání frekvence 1 | Long (I32) |
|
|
|
cp | Rychlost rozmítání 0.5 1.0 0.995 | Double (F64) |
iavg | Počet vzorků pro průměrování 10 | Long (I32) |
alpha | Relativní poloha pólů rekonstruktoru (ve fázi identifikace) 2.0 | Double (F64) |
xi | Koeficient tlumení rekonstruktoru (ve fázi identifikace) 0.707 | Double (F64) |
MANF | Ruční výběr bodů frekvenční charakteristiky | Bool |
|
|
|
ph1 | Fázové zpoždění prvního bodu ve stupních -60.0 | Double (F64) |
ph2 | Fázové zpoždění druhého bodu ve stupních -120.0 | Double (F64) |
stime | Doba ustáleni [s] 10.0 | Double (F64) |
ralpha | Relativní poloha pólů rekonstruktoru 4.0 | Double (F64) |
rxi | Koeficient tlumení rekonstruktoru 0.707 | Double (F64) |
acl1 | Relativní poloha 1. dvojice pólů uzavřené smyčky 1.0 | Double (F64) |
xicl1 | Tlumení 1. dvojice pólů uzavřené smyčky 0.707 | Double (F64) |
INTGF | Příznak rozšíření o integrátor on | Bool |
|
|
|
apcl | Relativní poloha reálného pólu 1.0 | Double (F64) |
DISF | Příznak rozšíření o model poruchy | Bool |
|
|
|
dom | Přirozená frekvence modelu poruchy 1.0 | Double (F64) |
dxi | Koeficient tlumení modelu poruchy | Double (F64) |
acl2 | Relativní poloha 2. dvojice 2.0 | Double (F64) |
xicl2 | Tlumení 2. dvojice pólů uzavřené smyčky 0.707 | Double (F64) |
tt | Časová konstanta vysledování 1.0 | Double (F64) |
hilim | Horní mez akčního zásahu regulátoru 1.0 | Double (F64) |
lolim | Dolní mez akčního zásahu regulátoru -1.0 | Double (F64) |
mb1p | Koeficient přenosu řízeného systému () | Double (F64) |
mb0p | Koeficient přenosu řízeného systému () 1.0 | Double (F64) |
ma1p | Koeficient přenosu řízeného systému () 0.2 | Double (F64) |
ma0p | Koeficient přenosu řízeného systému () 1.0 | Double (F64) |
[Předchozí] [Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com