MC_GearIn, MCP_GearIn – Engange the master/slave velocity ratio
Block SymbolsLicensing group: MOTION CONTROL
Function Description
The MC_GearIn and MCP_GearIn blocks offer the same functionality, the only difference
is that some of the inputs are available as parameters in the MCP_ version of the
block.
The MC_GearIn block commands the slave axis motion in such a way that a preset ratio between master and slave velocities is maintained. Considering the velocity of master axis and velocity of slave axis , following relation holds (without phasing): . Position and acceleration is commanded to be consistent with velocity; position/distance ratio is also locked. This mode of synchronized motion is called electronic gear.
The gear mode is switched off by executing other motion block on slave axis with mode aborting or by executing a MC_GearIn block.
Similarly to the MC_CamIn block, ramp-in mode is activated if initial velocity of slave axis is different from master axis and gearing ratio. Parameters Acceleration, Deceleration, Jerk are used during ramp-in mode.
Inputs
uMaster | Master axis reference | Reference |
uSlave | Slave axis reference | Reference |
Execute | The block is activated on rising edge | Bool |
RatioNumerator | Gear ratio Numerator | Long (I32) |
RatioDenominator | Gear ratio Denominator | Long (I32) |
Acceleration | Maximal allowed acceleration [unit/s] | Double (F64) |
Deceleration | Maximal allowed deceleration [unit/s] | Double (F64) |
Jerk | Maximal allowed jerk [unit/s] | Double (F64) |
BufferMode | Buffering mode | Long (I32) |
|
|
|
Outputs
yMaster | Master axis reference | Reference |
ySlave | Slave axis reference | Reference |
InGear | Slave axis reached gearing ratio | Bool |
CommandAborted | Algorithm was aborted | Bool |
Busy | Algorithm not finished yet | Bool |
Active | The block is controlling the axis | Bool |
Error | Error occurred | Bool |
ErrorID | Result of the last operation | Error |
|
|
|
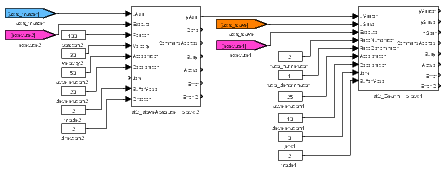
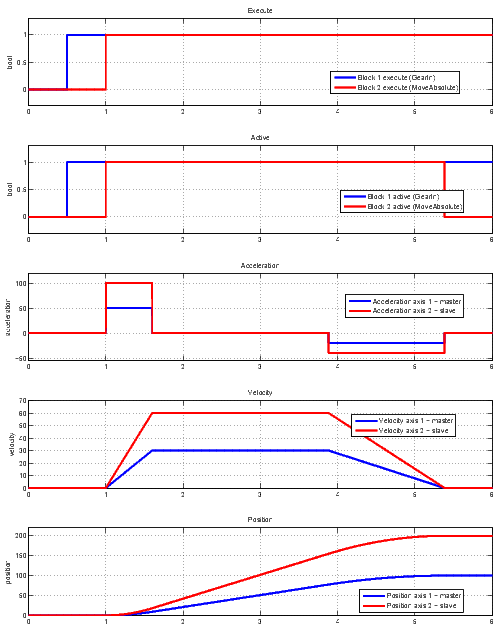
Example
[Previous] [Back to top] [Up] [Next]
2023 © REX Controls s.r.o., www.rexygen.com