IPEN2, IPEN3 – N-ramenné inverzní kyvadlo na vozíku - Fyzikální parametry
Symboly blokůPotřebná licence: MODEL


Popis funkce
Bloky IPEN2 a IPEN3 simulují dynamiku dvojitého a trojitého inverzního kyvadla na
vozíku. Tyto modely umožňují uživatelům provádět experimenty s různými
řídícími strategiemi, čímž jsou vhodné jak pro vzdělávací účely, tak pro
vědecký výzkum.
Hlavním vstupem do modelů je analogový signál u, jehož interpretace závisí na nastavení parametru IACC:
- pro IACC=on je vstup u považován za sílu působící na vozík [N],
- pro IACC=off modely předpokládají, že vstup představuje rychlost [m/s].
Signál R1 slouží k resetování každého modelu do jeho počáteční konfigurace.
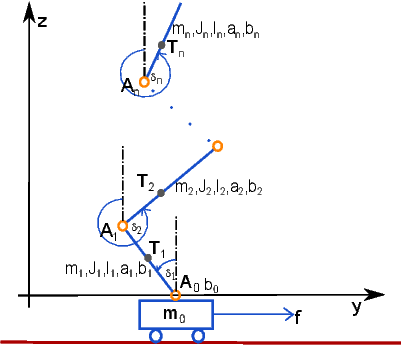
Oba modely lze detailně konfigurovat pomocí série parametrů, které odpovídají fyzikálním charakteristikám systému. Tyto parametry zahrnují relativní polohu těžiště kyvadel a, moment setrvačnosti J, délku l a hmotnost kyvadel m, koeficienty tlumení b a počáteční stav systému (polohy d_0, rychlosti dd_0). Schematické znázornění systému s parametry je na obrázku níže. Většina parametrů má jasnou definici, relativní poloha těžiště i-tého kyvadla je dána vztahem
kde je pozice předchozího kloubu, je pozice těžiště kyvadla a je délka kyvadla.
Výpočet modelů je v souladu s matematickým modelem a fyzikálními parametry, které jsou podrobně popsány v literatuře [5]. Bloky IPEN2pu a IPEN3pu jsou využívány pro simulaci modelů inverzních kyvadel s dynamickými parametry.
Tento blok nepropaguje kvalitu signálu. Více informací je uvedeno v sekci 1.4.
Vstup
u | Analogový vstupní signál | Double (F64) |
R1 | Reset bloku | Bool |
Parametr
a1 | Relativní poloha těžiště 1.0 | Double (F64) |
a2 | Relativní poloha těžiště 1.0 | Double (F64) |
a3 | Relativní poloha těžiště 1.0 | Double (F64) |
J1 | Moment setrvačnosti kyvadla [kg.m^2] 1.0 | Double (F64) |
J2 | Moment setrvačnosti kyvadla [kg.m^2] 1.0 | Double (F64) |
J3 | Moment setrvačnosti kyvadla [kg.m^2] 1.0 | Double (F64) |
l1 | Délka kyvadla [m] 1.0 | Double (F64) |
l2 | Délka kyvadla [m] 1.0 | Double (F64) |
l3 | Délka kyvadla [m] 1.0 | Double (F64) |
m1 | Hmotnost kyvadla [kg] 1.0 | Double (F64) |
m2 | Hmotnost kyvadla [kg] 1.0 | Double (F64) |
m3 | Hmotnost kyvadla [kg] 1.0 | Double (F64) |
m0 | Hmotnost vozíku [kg] 1.0 | Double (F64) |
b1 | Koeficient tlumení kyvadla 1.0 | Double (F64) |
b2 | Koeficient tlumení kyvadla 1.0 | Double (F64) |
b3 | Koeficient tlumení kyvadla 1.0 | Double (F64) |
b0 | Koeficient tlumení vozíku 1.0 | Double (F64) |
d1_0 | Počáteční poloha kyvadla [rad] 1.0 | Double (F64) |
d2_0 | Počáteční poloha kyvadla [rad] 1.0 | Double (F64) |
d3_0 | Počáteční poloha kyvadla [rad] 1.0 | Double (F64) |
x_0 | Počáteční poloha vozíku [m] 1.0 | Double (F64) |
dd1_0 | Počáteční úhlová rychlost kyvadla [rad/s] 1.0 | Double (F64) |
dd2_0 | Počáteční úhlová rychlost kyvadla [rad/s] 1.0 | Double (F64) |
dd3_0 | Počáteční úhlová rychlost kyvadla [rad/s] 1.0 | Double (F64) |
dx_0 | Počáteční rychlost vozíku [m/s] 1.0 | Double (F64) |
IACC | on=Vstup u je síla, off=Vstup u je rychlost | Bool |
Výstup
d1 | Poloha kyvadla [rad] | Double (F64) |
d2 | Poloha kyvadla [rad] | Double (F64) |
d3 | Poloha kyvadla [rad] | Double (F64) |
x | Poloha vozíku [m] | Double (F64) |
dd1 | Úhlová rychlost kyvadla [rad/s] | Double (F64) |
dd2 | Úhlová rychlost kyvadla [rad/s] | Double (F64) |
dd3 | Úhlová rychlost kyvadla [rad/s] | Double (F64) |
dx | Rychlost vozíku [m/s] | Double (F64) |
E | Příznak chyby | Bool |
[Předchozí] [Na začátek] [Výše] [Další]
2024 © REX Controls s.r.o., www.rexygen.com