MCU – Manual control unit
Block SymbolLicensing group: STANDARD

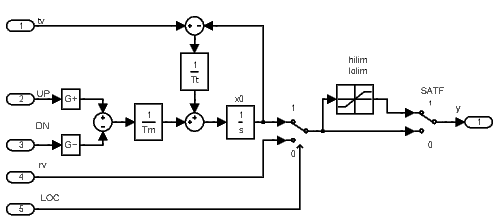
Function Description
The MCU block is suitable for manual setting of the numerical output value y, e.g. a setpoint. In the
local mode ()
the value is set using the buttons UP and DN. The rate of increasing/decreasing of the output y
from the initial value y0 is determined by the integration time constant tm and pushing time of
the buttons. After elapsing ta seconds while a button is pushed, the rate is always multiplied
by the factor q until the time tf is elapsed. Optionally, the output y range can be constrained
()
by saturation limits lolim and hilim. If none of the buttons is pushed
( and
), the
output y tracks the input value tv. The tracking speed is controlled by the integration time
constant tt.
In the remote mode (), the input rv is optionally saturated () and copied to the output y. The detailed function of the block is depicted in the following diagram.
Inputs
tv | Tracking variable | Double (F64) |
UP | The "up" signal | Bool |
DN | The "down" signal | Bool |
rv | Remote output value in the mode | Double (F64) |
LOC | Local or remote mode | Bool |
Output
y | Analog output of the block | Double (F64) |
Parameters
tt | Tracking time constant of the input tv 1.0 | Double (F64) |
tm | Initial value of integration time constant 100.0 | Double (F64) |
y0 | Initial output value | Double (F64) |
q | Multiplication quotient 5.0 | Double (F64) |
ta | Interval after which the rate is changed [s] 4.0 | Double (F64) |
tf | Interval after which the rate changes no more [s] 8.0 | Double (F64) |
SATF | Saturation flag | Bool |
|
|
|
hilim | Upper limit of the output signal 1.0 | Double (F64) |
lolim | Lower limit of the output signal -1.0 | Double (F64) |
[Previous] [Back to top] [Up] [Next]
2024 © REX Controls s.r.o., www.rexygen.com