MC_PhasingAbsolute, MCP_PhasingAbsolute – Phase shift in synchronized motion (absolute coordinates)
Block SymbolsLicensing group: MOTION CONTROL

Function Description
The MC_PhasingAbsolute and MCP_PhasingAbsolute blocks offer the same functionality,
the only difference is that some of the inputs are available as parameters in the MCP_ version of
the block.
The MC_PhasingAbsolute block introduces an additional phase shift in master-slave relation defined by an electronic cam (MC_CamIn) or electronic gear (MC_GearIn). The functionality of this command is very similar to MC_MoveSuperimposed (additive motion from to PhaseShift position with respect to maximum velocity acceleration and jerk). The only difference is that the additive position/velocity/acceleration is added to master axis reference position in the functional dependence defined by a cam or gear ratio for the computation of slave motion instead of its direct summation with master axis movement. The absolute value of final phase shift is specified by PhaseShift parameter.
Note: The motion command is analogous to rotation of a mechanical cam by angle PhaseShift
Inputs
uMaster | Master axis reference | Reference |
uSlave | Slave axis reference | Reference |
Execute | The block is activated on rising edge | Bool |
PhaseShift | Requested phase shift (distance on master axis) for cam | Double (F64) |
Velocity | Maximal allowed velocity [unit/s] | Double (F64) |
Acceleration | Maximal allowed acceleration [unit/s] | Double (F64) |
Deceleration | Maximal allowed deceleration [unit/s] | Double (F64) |
Jerk | Maximal allowed jerk [unit/s] | Double (F64) |
BufferMode | Buffering mode | Long (I32) |
|
|
|
Outputs
yMaster | Master axis reference | Reference |
ySlave | Slave axis reference | Reference |
Done | Algorithm finished | Bool |
CommandAborted | Algorithm was aborted | Bool |
Busy | Algorithm not finished yet | Bool |
Active | The block is controlling the axis | Bool |
Error | Error occurred | Bool |
ErrorID | Result of the last operation | Error |
|
|
|
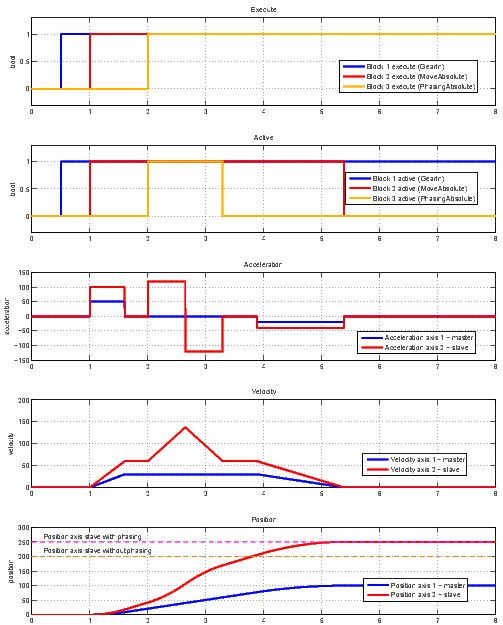
Example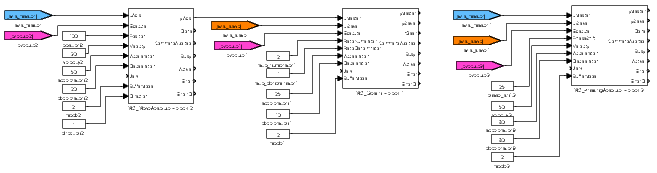
[Previous] [Back to top] [Up] [Next]
2024 © REX Controls s.r.o., www.rexygen.com