SCU – Step controller with position feedback
Block SymbolLicensing group: STANDARD

Function Description
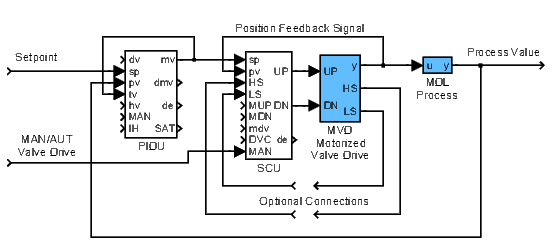
The SCU block implements the secondary (inner) position controller of the step controller loop.
PIDU function block or some of the derived function blocks (PIDMA, etc.) is assumed as the
primary controller.
The SCU block processes the control deviation by a three state element with parameters (thresholds) thron and throff (see the TSE block, use parameters , , and ). The parameter RACT determines whether the UP or DN pulse is generated for positive or negative value of the controller deviation. Two pulse outputs of the three state element are further shaped so that minimum pulse duration dtime and minimum pulse break time btime are guaranteed at the block UP and DN outputs. If signals from high and low limit switches of the valve are available, they should be connected to the HS and LS inputs.
There is also a group of input signals for manual control available. The manual mode is activated by the input signal. Then it is possible to move the motor back and forth by the MUP and MDN input signals. It is also possible to specify a position increment/decrement request by the mdv input. In this case the request must be confirmed by a rising edge (offon) in the DVC input signal.
The control function of the SCU block is quite clear from the following diagram.
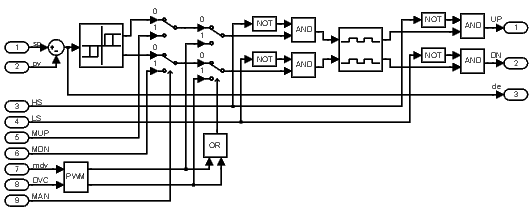
The complete structure of the three-state step controller is depicted in the following figure.
Inputs
sp | Setpoint (output of the primary controller) | Double (F64) |
pv | Controlled variable (position of the motorized valve drive) | Double (F64) |
HS | Upper end switch (detects the upper limit position of the valve) | Bool |
LS | Lower end switch (detects the lower limit position of the valve) | Bool |
MUP | Manual UP signal | Bool |
MDN | Manual DN signal | Bool |
mdv | Manual differential value (requested position increment/decrement with higher priority than direct signals MUP/MDN) | Double (F64) |
DVC | Differential value change command (offon) | Bool |
MAN | Manual or automatic mode | Bool |
|
|
|
Outputs
UP | The "up" signal | Bool |
DN | The "down" signal | Bool |
de | Deviation error | Double (F64) |
Parameters
thron | Switch-on value 0.0 0.02 | Double (F64) |
throff | Switch-off value 0.0 0.01 | Double (F64) |
dtime | Minimum width of the output pulse [s] 0.0 0.1 | Double (F64) |
btime | Minimum delay between two subsequent output pulses [s] to do 0.0 0.1 | Double (F64) |
RACT | Reverse action flag | Bool |
|
|
|
trun | Motor time constant (determines the time during which the motor position changes by one unit) 0.0 10.0 | Double (F64) |
[Previous] [Back to top] [Up] [Next]
2024 © REX Controls s.r.o., www.rexygen.com