SMHCC – Regulátor pro procesy s topením a chlazením
Symbol blokuPotřebná licence: ADVANCED
Popis funkce
Regulátor SMHCC (Sliding Mode Heating/Cooling Controller) je snadno nastavitelný
regulátor pro kvalitní regulaci teplotních soustav s dvoustavovým (ON-OFF) topením
a dvoustavovým (ON-OFF) chlazením. Klasickým příkladem takových soustav je
plastikářský lis. SMHCC může být samozřejmě nasazen i na jiné soustavy, kde se
dosud běžně používají konvenční termostaty. Pro zajištění správné funkce
je nutné blok SMHCC doplnit blokem PWM (Pulse Width Modulation), jak je
patrné z následujícího obrázku.
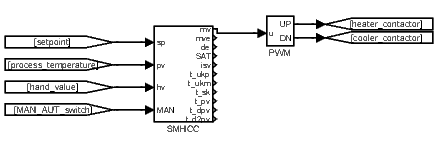
Blok SMHCC pracuje se dvěma časovými periodami. První perioda je vzorkovací perioda měřené teploty a je rovněž rovna periodě, se kterou se blok regulátoru SMHCC spouští. Druhá perioda je perioda řízení, se kterou blok SMHCC generuje akční zásahy. Tato perioda je totožná s periodou cyklu bloku PWM. V každém okamžiku, když se změní akční zásah mv bloku SMHCC, algoritmus bloku PWM přepočte šířku pulsu a spustí nový PWM cyklus. Třetí perioda, kterou je třeba stanovit, je perioda spouštění bloku PWM. Obecně může být . Pro dosažení co nejlepší kvality řízení je doporučeno nastavit periodu na minimální možnou hodnotu ( na maximální možnou hodnotu), poměr maximální, ale by měla být dostatečně malá vzhledem k dynamice procesu. Pro aplikace v plastikářském průmyslu jsou doporučeny následující hodnoty:
Zákon řízení bloku regulátoru SMHCC v automatickém režimu (MAN=off) je založen na diskrétní technice dynamického řízení s klouzavým režimem a dále je použit speciální filtr třetího řádu pro odhad první a druhé derivace regulační odchylky.
Po změně požadované hodnoty sp (setpoint) se regulátor dostane do první fáze, tzv. přibližovací, kdy diskrétní proměnná klouzavého režimu
je stlačena do nuly. Ve výše uvedené definici neznámé po řadě označují filtrovanou regulační odchylku (pv-sp), první a druhou derivaci v čase . Parametry a jsou popsány níže. V druhé fázi (kvazi klouzavý režim) je proměnná držena v okolí nulové hodnoty pomocí patřičných zásahů řízení, režim topení se střídá s režimem chlazení. Amplitudy topení a chlazení se adaptují tak, aby se dosáhlo přibližně V důsledku toho je hypotetická spojitá proměnná klouzavého režimu
stále přibližně nulová. Jinak řečeno regulační odchylka je popsána diferenciální rovnicí druhého řádu
Z toho plyne, že vývoj může být ovlivněn volbou parametrů a Poznamenejme, že pro stabilní chování musí být splněno a Typická optimální hodnota leží v intervalu Optimální hodnota je silně závislá na řízeném procesu, pomalejší procesy mají menší hodnotu a rychlejší větší. Doporučená hodnota pro začátek ladění parametrů je .
Řídicí veličena mv je obvykle v intervalu . Kladná hodnota odpovídá topení, záporná chlazení, např. znamená plné topení. Omezení na mv může být zadáno parametry hilim_p a hilim_m. Omezení může být potřebné, když existuje velká nesymetrie mezi topením a chlazením. Jestliže je například chlazení mnohem agresivnější než topení, je vhodné nastavit and . Pokud chceme omezení aplikovat pouze v intervalu po změně požadované hodnoty sp, volíme u0_p a u0_m tak, že platí a .
Hodnoty amplitud proměnných pro topení a chlazení t_ukp, t_ukm se automaticky adaptují speciálním algoritmem tak, aby byl dosažen kvazi klouzavý režim, ve kterém se střídají znaménka po každém kroku. V tomto případě se výstup isv přepíná mezi a . Rychlost adaptace amplitud topení a chlazení je dána časovými konstantami taup a taum. Obě tyto časové konstanty musí být dostatečně velké, aby zajistily správnou funkci adaptace, ale jejich jemné doladění není nezbytné pro výslednou kvalitu regulace. Pro úplnost dodejme, že mv je určena na základě amplitud t_ukp a t_ukm podle následujícího výrazu
Dále je třeba říci, že dosažení kvazi klouzavého režimu nastává velmi zřídka, protože řízené procesy obsahují dopravní zpoždění a působí na ně poruchy. Vhodným indikátorem kvality "klouzání"je opět výstup isv. Pro jemné doladění je možno v mimořádných případech použít parametr beta definující šířku pásma derivačního filtru. Ve většině případů však vyhovuje přednastavená hodnota .
V manuálním režimu ()
je vstup regulátoru hv kopírován po případném omezení saturačními mezemi na
výstup mv.
Vstupy
sp | požadovaná hodnota (setpoint) | Double (F64) |
pv | regulovaná veličina (process variable) | Double (F64) |
hv | výstup regulátoru v manuálním režimu (hand value) | Double (F64) |
MAN | režim činnosti regulátoru | Bool |
|
|
|
Výstupy
mv | řídicí veličina (manipulated variable) | Double (F64) |
de | regulační odchylka (deviation error) | Double (F64) |
SAT | příznak saturace | Bool |
|
|
|
isv | počet kladných nebo záporných kroků přepínací proměnné | Long (I32) |
t_ukp | aktuální hodnota amplitudy topení | Double (F64) |
t_ukm | aktuální hodnota amplitudy chlazení | Double (F64) |
t_sk | přepínací proměnná | Double (F64) |
t_ek | filtrovaná regulační odchylka | Double (F64) |
t_dek | filtrovaná první derivace regulační odchylky | Double (F64) |
t_2dek | filtrovaná druhá derivace regulační odchylky | Double (F64) |
Parametry
ipwmc | počet PWM cyklů během jedné periody spouštění bloku SMHCC () | Long (I32) |
xi | relativní tlumení | Double (F64) |
om | přirozená frekvence | Double (F64) |
taup | časová konstanta adaptace amplitudy topení v sekundách | Double (F64) |
taum | časová konstanta adaptace amplitudy chlazení v sekundách | Double (F64) |
beta | šířka pásma derivačního filtru; ; doporučená hodnota 0.1 | Double (F64) |
hilim_p | horní saturační mez amplitudy topení () | Double (F64) |
hilim_m | horní saturační mez amplitudy chlazení () | Double (F64) |
u0_p | počáteční hodnota amplitudy topení po změně požadované hodnoty nebo startu bloku | Double (F64) |
u0_m | počáteční hodnota amplitudy chlazení po změně požadované hodnoty nebo startu bloku | Double (F64) |
sp_dif | Práh pro detekci změny setpointu 10.0 | Double (F64) |
tauf | Časová konstanta filtru ekvivalentní akční veličiny 400.0 | Double (F64) |
[Předchozí] [Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com