MC_CombineAxes, MCP_CombineAxes – Combine the motion of 2 axes into a third axis
Block SymbolsLicensing group: MOTION CONTROL

Function Description
The MC_CombineAxes block combines a motion of two master axes into a slave axis command. The slave axis indicates synchronized motion state. Following relationship holds:
Negative number can be set in GearRatio... parameter to obtain the resulting slave movement in form of difference of master axes positions.
Inputs
uMaster1 | First master axis reference | Reference |
uMaster2 | Second master axis reference | Reference |
uSlave | Slave axis reference | Reference |
Execute | The block is activated on rising edge | Bool |
GearRatioNumeratorM1 | Numerator for the gear factor for master axis 1 | Long (I32) |
GearRatioDenominatorM1 | Denominator for the gear factor for master axis 1 | Long (I32) |
GearRatioNumeratorM2 | Numerator for the gear factor for master axis 2 | Long (I32) |
GearRatioDenominatorM2 | Denominator for the gear factor for master axis 2 | Long (I32) |
BufferMode | Buffering mode | Long (I32) |
|
|
|
RampIn | RampIn factor (0 = RampIn mode not used) | Double (F64) |
Outputs
yMaster1 | First master axis reference | Reference |
yMaster2 | Second master axis reference | Reference |
ySlave | Slave axis reference | Reference |
InSync | Slave axis reached the cam profile | Bool |
CommandAborted | Algorithm was aborted | Bool |
Busy | Algorithm not finished yet | Bool |
Active | The block is controlling the axis | Bool |
Error | Error occurred | Bool |
ErrorID | Result of the last operation | Error |
|
|
|
SyncDistance | Position deviation of the slave axis from synchronized position | Double (F64) |
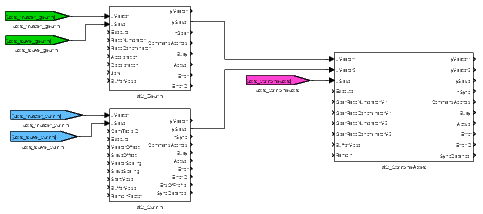
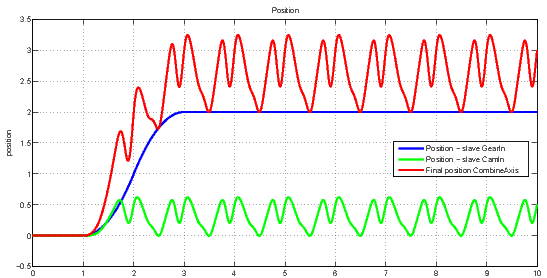
Example
[Previous] [Back to top] [Up] [Next]
2020 © REX Controls s.r.o., www.rexygen.com