MC_GearIn, MCP_GearIn – Zapnutí konstantního převodového poměru
Symboly blokůPotřebná licence: MOTION CONTROL
Popis funkce
Bloky MC_GearIn a MCP_GearIn mají naprosto shodnou funkci, jediným rozdílem je, že
MCP_ varianta bloku má méně vstupů a potřebné konstanty se zadávají jako parametry
bloku.
Blok MC_GearIn zapíná režim, kdy je podřízená osa (tj. ta, která je připojena ke vstupu uSlave) řízena tak, že její poloha je závislá na poloze hlavní osy (tj. ta, která je připojena ke vstupu uMaster), přičemž poměr rychlostí obou os je dán parametry RatioNumerator a RatioDenominator. Pokud označíme rychlost hlavní osy a rychlost podřízené osy , pak platí (bez fázování):
Tento režim osy je často nazýván elektronická převodovka. Poloha a zrychlení podřízené osy je dopočítávána konzistentně s uvedenou rychlostí.
Režim převodovky lze ukončit zapnutím jiného pohybu na podřízené ose v režimu aborting nebo spuštěním bloku MC_GearOut.
Při aktivaci funkce převodovky (tj. v okamžiku, kdy blok MC_GearIn převezme řízení osy) nemusí rychlost (a popřípadě i zrychlení pokud jej požadujeme spojité, tj. jerk<>0) odpovídat požadované hodnotě rychlosti (a popř. i zrychlení) hlavní osy a převodovému poměru. V takovém případě nastává přechodový děj, kdy rychlost ještě neodpovídá převodovému poměru - tzv. RampIn režim. V tomto RampIn režimu jsou použity parametry Acceleration, Deceleration, Jerk a blok řídí podřízenou osu tak, aby se co nejdříve (s respektováním omezení na zrychlení a popř. jerk) dostala do synchronního stavu.
Vstupy
uMaster | Odkaz na hlavní osu | Reference |
uSlave | Odkaz na podřízenou osu | Reference |
Execute | Náběžná hrana aktivuje blok | Bool |
RatioNumerator | Převodový poměr - čitatel (podřízená osa) | Long (I32) |
RatioDenominator | Převodový poměr - jmenovatel (hlavní osa) | Long (I32) |
Acceleration | Maximální povolené zrychlení [unit/s] | Double (F64) |
Deceleration | Maximální povolené zpomalení [unit/s] | Double (F64) |
Jerk | Maximální povolená změna zrychlení [unit/s] | Double (F64) |
BufferMode | Režim převzetí osy | Long (I32) |
|
|
|
Výstupy
yMaster | Odkaz na hlavní osu | Reference |
ySlave | Odkaz na podřízenou osu | Reference |
InGear | Příznak dosažení požadované rychlosti řízenou osou | Bool |
CommandAborted | Příznak přerušení funkce bloku | Bool |
Busy | Příznak, že algoritmus ještě neskončil | Bool |
Active | Příznak, že blok řídí osu | Bool |
Error | Příznak chyby | Bool |
ErrorID | Výsledek poslední operace | Error |
|
|
|
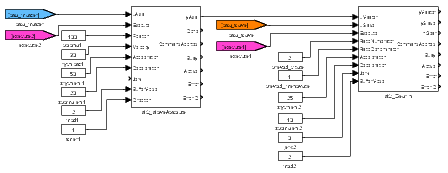
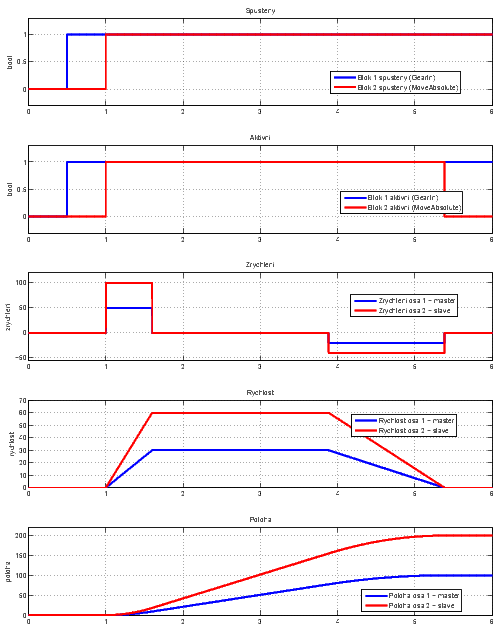
Příklad
[Předchozí] [Na začátek] [Výše] [Další]
2024 © REX Controls s.r.o., www.rexygen.com