PIDMA – PID regulátor s momentovým autotunerem
Symbol blokuPotřebná licence: AUTOTUNING

Popis funkce
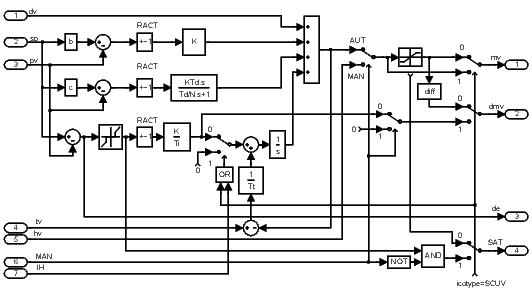
V automatickém režimu ()
realizuje blok PIDMA řídicí zákon PID regulátoru se dvěma stupni volnosti ve
tvaru
kde je Laplaceova transformace řídicí veličiny mv, je Laplaceova transformace požadované hodnoty sp, je Laplaceova transformace regulované veličiny pv, je Laplaceova transformace dopředné vazby dv a , , , , , jsou parametry regulátoru. Znaménko pravé strany závisí na parametru RACT. Rozsah řídicí veličiny mv (polohového výstupu regulátoru) je omezen parametry hilim, lolim. Parametr dz udává pásmo necitlivosti v integrační složce regulátoru. Navíc integrační složka může být vypnuta a zafixována na své aktuální hodnotě vstupem . Pro správnou funkci regulátoru je nutné propojit výstup regulátoru mv se vstupem tv a správně nastavit časovou konstantu vysledovávání tt
Doporučená výchozí hodnota pro PID regulátor je , pro PI regulátor pak . Tím bude zaručen bezrázový přechod při přepínání režimu regulátoru (manuální, automatický) a správná funkce regulátoru při saturaci výstupu mv (tzv. antiwindup). Úpravou parametru tt je v případě potřeby možné nastavit přesné chování v saturaci (tzv. odskakování od saturace vlivem šumu) a při přepínání více regulátorů (velikost skoku při přepnutí, pokud není nulová regulační odchylka).
Přídavné výstupy dmv, de a SAT poskytují po řadě rychlostní výstup regulátoru (diference mv), regulační odchylku a příznak saturace výstupu regulátoru mv.
Jestliže je blok PIDMA propojen s blokem SCUV (za účelem realizace krokového regulátoru bez polohové zpětné vazby), potom parametr icotype musí být nastaven na hodnotu 4 a význam výstupů mv, dmv a SAT je v tomto případě pozměněn: výstup mv je roven součtu P a D složky regulátoru, zatímco výstup dmv poskytuje diferenci jeho I složky a výstup SAT nese informaci pro blok SCUV, zda je regulační odchylka de v automatickém režimu menší než pásmo necitlivosti dz. Pro případ propojení bloků PIDMA a SCUV se navíc doporučuje volit váhový koeficient požadované hodnoty pro derivační složku c rovný nule.
V manuálním režimu () je vstup hv kopírován na výstup mv. Celková regulační funkce bloku PIDMA je zřejmá z následujícího obrázku.
Blok PIDMA rozšiřuje řídicí funkci standardního PID regulátoru o vestavěné automatické nastavování parametrů (PID autotuner). Před spuštěním autotuneru musí operátor ve vhodném pracovním bodě dosáhnout ustáleného stavu a zvolit požadovaný typ regulátoru ittype (PI nebo PID) a nastavit další parametry autotuneru (iainf, DGC, tdg, tn, amp, dy a ispeed). Identifikační experiment se startuje vstupem TUNE (vstupem TBRK jej lze předčasně ukončit). V tomto módu () je nejprve odhadnut drift a šum regulované veličiny (ve specifikovaném čase tdgtn) a poté je na vstup procesu aplikován pravoúhlý puls. Z odezvy procesu jsou odhadnuty první tři momenty jeho impulsní odezvy. Amplituda pulsu se nastavuje parametrem amp. Puls je ukončen poté, co se hodnota regulované veličiny pv změní o více, než určuje tolerance (práh) dy (zadává se vždy jako kladné číslo). Pokud je nastaven příznak DGC, používá se při zpracování signálu speciální kompenzace trendu signálu. Odhad času zbývajícího do konce procesu ladění je přiveden na výstup trem.
Pokud experiment skončí úspěšně () a vstup , objeví se optimální parametry na výstupech pk, pti, ptd, pnd, pb, pc. V opačném případě () určuje výstup ite kód chyby experimentu. Další hodnoty vstupu ips jsou rezervovány pro speciální účely.
Funkce autotuneru je demonstrována na následujícím obrázku.
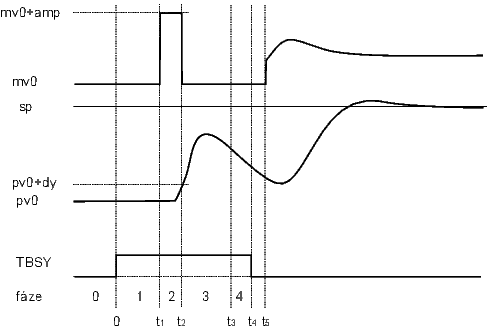
Během identifikačního experimentu výstup ite indikuje jednotlivé fáze činnosti autotuneru. Ve fázi odhadu strmosti odeznívání odezvy () může být proces ladění předčasně manuálně ukončen. V tomto případě jsou parametry regulátoru řádně navrženy, avšak jejich možná nepřesnost je indikována varovným kódem .
Po ukončení experimentu (TBSY onoff) je funkce regulátoru závislá na nastaveném režimu (manuální, automatický). Jestliže , potom jsou navržené parametry okamžitě použity.
Vstupy
dv | Proměnná dopředné vazby | Double (F64) |
sp | Požadovaná hodnota (setpoint) | Double (F64) |
pv | Řízená veličina | Double (F64) |
tv | Veličina pro vysledování | Double (F64) |
hv | Hodnota výstupu v manuálním režimu | Double (F64) |
MAN | Manuální nebo automatický režim | Bool |
|
|
|
IH | Zastavení integrace | Bool |
|
|
|
TUNE | Zahájení ladicího experimentu nebo vynucení přechodu do další fáze experimentu | Bool |
TBRK | Ukončení ladicího experimentu | Bool |
TAFF | Přijetí výsledků ladicího experimentu | Bool |
|
|
|
ips | Význam výstupních signálů pk, pti, ptd, pnd, pb a pc | Long (I32) |
|
|
|
Výstupy
mv | Akční zásah regulátoru (manipulated variable) | Double (F64) |
dmv | Rychlostní výstup regulátoru (diference) | Double (F64) |
de | Regulační odchylka | Double (F64) |
SAT | Saturace | Bool |
|
|
|
TBSY | Příznak probíhajícího ladicího experimentu | Bool |
TE | Příznak chyby během ladění | Bool |
|
|
|
ite | Kód chyby | Long (I32) |
| Kódy chyb ladění (po experimentu): |
|
|
|
|
| Kódy fází ladění (během experimentu): |
|
|
|
|
| Poznámka k ukončování fází ladění: |
|
|
|
|
trem | Odhad času do ukončení experimentu [s] | Double (F64) |
pk | Navržené zesílení regulátoru () | Double (F64) |
pti | Navržená integrační časová konstanta regulátoru () | Double (F64) |
ptd | Navržená derivační časová konstanta regulátoru () | Double (F64) |
pnd | Navržený parametr filtru derivační složky () | Double (F64) |
pb | Navržený váhový faktor pro proporcionální složku () | Double (F64) |
pc | Navržený váhový faktor pro derivační složku () | Double (F64) |
Parametry
irtype | Typ regulátoru 6 | Long (I32) |
|
|
|
RACT | Převrácené působení výstupu regulátoru | Bool |
|
|
|
k | Zesílení regulátoru . Hodnota 0 (dle definice) vypne regulátor, záporné hodnoty nejsou dovoleny (k tomu slouží parametr RACT). 0.0 1.0 | Double (F64) |
ti | Integrační časová konstanta . Hodnota 0 znamená vypnutí integrační složky regulátoru (stejný efekt jako vypnutí parametrem irtype). 0.0 4.0 | Double (F64) |
td | Derivační časová konstanta . Hodnota 0 znamená vypnutí derivační složky regulátoru (stejný efekt jako vypnutí parametrem irtype). 0.0 1.0 | Double (F64) |
nd | Parametr filtru derivační složky. Hodnota 0 znamená vypnutí derivační složky regulátoru (stejný efekt jako vypnutí parametrem irtype). 0.0 10.0 | Double (F64) |
b | Váhový faktor pro proporcionální složku 0.0 2.0 1.0 | Double (F64) |
c | Váhový faktor pro derivační složku 0.0 2.0 | Double (F64) |
tt | Časová konstanta vysledování; hodnota 0 znamená implicitní hodnotu, což je pro regulátor s integrační složkou a vypnutí vysledování pro regulátor bez integrační složky. Pokud pro P nebo PD regulátor potřebujeme vysledování (tzv. regulace kolem rovnovážného bodu), zapneme vysledování nastavením kladné hodnoty (větší než perioda vzorkování). Vypnout vysledování pro regulátor s integrační složkou není možné (kvůli windup efektu). 0.0 1.0 | Double (F64) |
hilim | Horní mez akčního zásahu regulátoru 1.0 | Double (F64) |
lolim | Dolní mez akčního zásahu regulátoru -1.0 | Double (F64) |
dz | Pásmo necitlivosti | Double (F64) |
icotype | Typ výstupu regulátoru 1 | Long (I32) |
|
|
|
ittype | Požadovaný typ regulátoru pro návrh 6 | Long (I32) |
|
|
|
iainf | Druh apriorní informace 1 | Long (I32) |
|
|
|
DGC | Kompenzace gradientu trendu on | Bool |
|
|
|
tdg | Doba odhadu gradientu trendu [s] 60.0 | Double (F64) |
tn | Doba odhadování šumu [s] 5.0 | Double (F64) |
amp | Amplituda pulzu 0.5 | Double (F64) |
dy | Práh pro ukončení pulsu (absolutní změna od ustálené hodnoty pv) 0.0 0.1 | Double (F64) |
ispeed | Požadovaná rychlost uzavřené smyčky 2 | Long (I32) |
|
|
|
ipid | Forma PID regulátoru 1 | Long (I32) |
|
|
|
[Předchozí] [Na začátek] [Výše] [Další]
2024 © REX Controls s.r.o., www.rexygen.com