SCUV – Krokový regulátor s rychlostním výstupem
Symbol blokuPotřebná licence: STANDARD

Popis funkce
Blok SCUV nahrazuje polohový regulátor SCU v úplné regulační smyčce s
třístavovým krokovým regulátorem, jestliže polohový signál servoventilu není
dostupný anebo dostatečně spolehlivý. Nadřazený regulátor PIDU
(nebo odvozený) je propojen s blokem SCUV signály mv, dmv a SAT (výstupy bloku
PIDU a vstupy bloku SCUV).
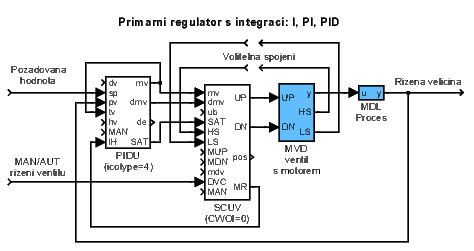
Jestliže je nadřazený regulátor typu PI nebo PID (), potom jsou všechny tři vstupy mv, dmv a SAT bloku SCUV zpracovávány speciálním integračním algoritmem a symetrickým třístavovým algoritmem s parametry (práhy) thron a throff (viz blok TSE, uvažujte parametry , , a ). Vzniklé pulsy (více, méně) jsou dále upravovány tak, že délka libovolného generovaného pulsu (UP, DN) na výstupu bloku je alespoň dtime a prodleva mezi dvěma po sobě jdoucími pulsy opačné polarity je alespoň btime. Parametr RACT určuje směr otáčení motoru. Poznamenejme, že nadřazený regulátor PIDU musí mít nastavení . Blok SCUV rekonstruuje rychlostní výstup nadřazeného regulátoru ze vstupů mv a dmv. Navíc, jestliže regulační odchylka nadřazeného regulátoru je menší než pásmo necitlivosti (), potom je výstup vnitřního integrátoru bloku SCUV nulován. Takto je dosaženo klidu servoventilu při dostatečně malé regulační odchylce nadřazeného regulátoru ( – viz popis bloku PIDU).
Poloha servoventilu pos je odhadována dalším vnitřním integrátorem s časovou konstantou trun. Jsou-li dostupné signály od koncových spínačů servoventilu, potom by měly být připojeny na vstupy HS (horní spínač) a LS (dolní spínač).
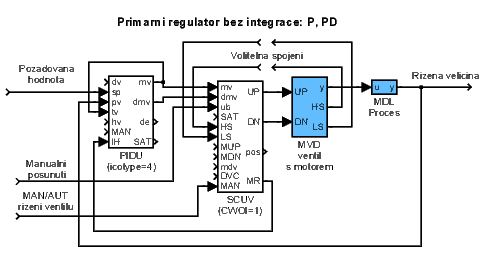
Jestiže je nadřazený regulátor typu P nebo PD (), potom může být regulační odchylka nadřazeného regulátoru manuálně odstraněna vhodným nastavením vstupu ub. V tomto případě je řídicí algoritmus bloku SCUV) lehce modifikován. Je užita rekonstruovaná hodnota polohy servoventilu pos a parametry thron, throff a tt musí být pečlivě nastaveny pro potlačení střídání pulsů více a méně v ustáleném stavu.
K dispozici je také sada vstupů pro manuální ovládání. Přepnutí do manuálního režimu je možné pomocí vstupu , pak lze s motorem pohybovat tam a zpět pomocí signálů MUP a MDN, eventuelně lze pomocí vstupu mdv nastavit, o kolik se má změnit poloha motoru, a tento požadavek potvrdit náběžnou hranou (offon) na vstupu DVC.
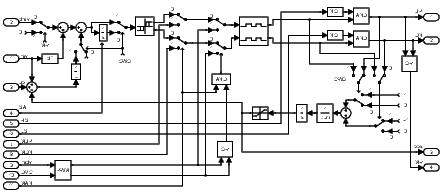
Celková funkce bloku SCUV je zřejmá z následujícího diagramu:
Úplné třístavové krokové regulátory bez polohové zpětné vazby jsou zobrazeny na následujících obrázcích:
Vstupy
mv | Akční zásah regulátoru (manipulated variable) | Double (F64) |
dmv | Rychlostní výstup regulátoru (diference) | Double (F64) |
ub | Posunutí (jen pokud je primární regulátor typu P nebo PD) | Double (F64) |
SAT | Nulování interního integrátoru (propojen s výstupem SAT primárního regulátoru) | Bool |
HS | Horní koncový spínač (příznak, že poloha ventilu je na horní mezi) | Bool |
LS | Dolní koncový spínač (příznak, že poloha ventilu je na spodní mezi) | Bool |
MUP | Manuální povel UP (nahoru, přidej) | Bool |
MDN | Manuální povel DN (dolů, uber) | Bool |
mdv | Ruční diferenční hodnota (požadovaný přírůstek/úbytek polohy, mající vyšší prioritu než přímé signály MUP/MDN) | Double (F64) |
DVC | Přijetí ruční diferenční hodnoty offon | Bool |
MAN | Manuální nebo automatický režim | Bool |
|
|
|
Výstupy
UP | Signál UP (nahoru, více) | Bool |
DN | Signál DN (dolů, méně) | Bool |
pos | Simulovaná poloha motoru | Double (F64) |
MR | Požadavek na běh motoru | Bool |
|
|
|
Parametry
thron | Mez pro zapnutí 0.0 0.02 | Double (F64) |
throff | Mez pro vypnutí 0.0 0.01 | Double (F64) |
dtime | Minimální trvání výstupního pulzu [s] 0.0 0.1 | Double (F64) |
btime | Minimální prodleva mezi dvěma následujícími pulzy [s] 0.0 0.1 | Double (F64) |
RACT | Převrácené působení výstupu regulátoru | Bool |
|
|
|
trun | Časová konstanta motoru (určuje dobu, za kterou se motor posune o hodnotu jedna) 0.0 10.0 | Double (F64) |
CWOI | Regulátor bez integrační složky | Bool |
|
|
|
tt | Časová konstanta vysledování 0.0 1.0 | Double (F64) |
[Předchozí] [Na začátek] [Výše] [Další]
2023 © REX Controls s.r.o., www.rexygen.com