NSCL – Nonlinear scaling factor
Block SymbolLicensing group: STANDARD

Function Description
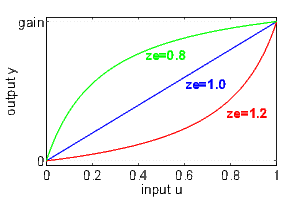
The NSCL block compensates common nonlinearities of the real world (e.g. the servo valve
nonlinearity) by using the formula
where gain and ze are the parameters of the block. The choice of ze within the interval leads to concave transformation, while gives a convex transformation.
Input
u | Analog input of the block | Double (F64) |
Output
y | Analog output of the block | Double (F64) |
Parameters
gain | Signal gain 1.0 | Double (F64) |
ze | Shaping parameter 1.0 | Double (F64) |
[Previous] [Back to top] [Up] [Next]
2023 © REX Controls s.r.o., www.rexygen.com