Kapitola 22
MC_COORD – Koordinované řízení pohybu
Knihovna MC_COORD je speciálně navržena pro koordinaci víceosého řízení pohybu v rámci komplexních systémů. Zahrnuje řadu bloků, včetně MC_MoveLinearAbsolute pro provádění přesných lineárních pohybů, doplněných o MC_MoveLinearRelative pro relativní lineární pohyb. Pro provádění kruhového pohybu knihovna obsahuje bloky MC_MoveCircularAbsolute a MC_MoveCircularRelative, což zajišťuje podrobné kruhové trajektorie. V kontextu správy řízení skupinových os tato knihovna zavádí MC_AddAxisToGroup, který je dále podporován funkcemi jako MC_GroupEnable pro aktivaci, MC_GroupDisable pro deaktivaci a MC_GroupHalt pro okamžité zastavení seskupených os. Dále knihovna poskytuje MC_MoveDirectAbsolute a MC_MoveDirectRelative, které umožňují přímou kontrolu nad pohyby os. Pro navigaci po složitých cestách je k dispozici MC_MovePath. Základní funkce monitorování a ovládání jsou usnadněny pomocí MC_GroupReadActualPosition pro údaje o poloze, MC_GroupReadActualVelocity pro přehled rychlosti, MC_GroupReadError pro detekci chyb a MC_GroupReadStatus pro aktualizace stavu. Knihovna navíc integruje MC_ReadCartesianTransform a MC_SetCartesianTransform, které jsou životně důležité pro procesy karteziánské transformace. Tato kolekce funkcí podtrhuje význam knihovny v aplikacích, které vyžadují synchronizované řízení více os, zejména v oblastech robotiky a automatizačních systémů.
MCP_GroupInterrupt – Přerušení pohybu skupiny os
MCP_GroupSetOverride – Nastavení násobivých faktorů na osách ve skupině
MCP_GroupSetPosition – Nastavení polohového offsetu skupiny os
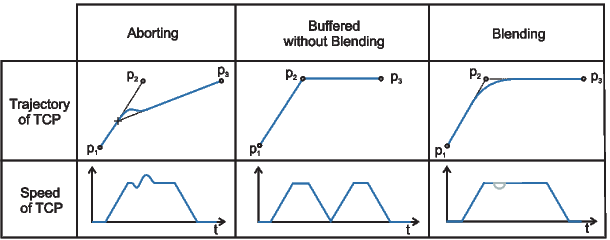
MCP_GroupStop – Zastavení koordinovaného pohybu
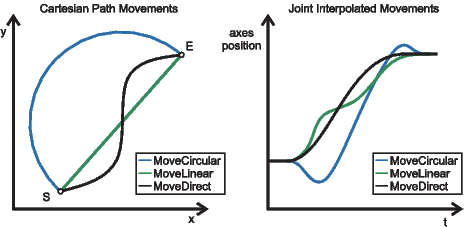
MCP_MoveCircularAbsolute – Pohyb do pozice po kružnicích (absolutní souřadnice)
MCP_MoveCircularRelative – Pohyb do pozice po kružnicích (relativní souřadnice)
MCP_MoveDirectAbsolute – Nekoordinovaný pohyb do pozice (absolutní souřadnice)
MCP_MoveDirectRelative – Nekoordinovaný pohyb do pozice (relativní souřadnice)
MCP_MoveLinearAbsolute – Pohyb do pozice po přímkách (absolutní souřadnice)
MCP_MoveLinearRelative – Pohyb do pozice po přímkách (relativní souřadnice)
MCP_MovePath – Generování obecné trajektorie v prostoru
MCP_MovePath_PH – Generování obecné trajektorie v prostoru PH
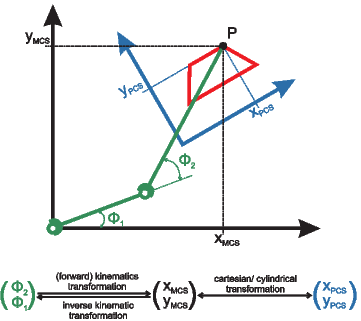
MCP_SetCartesianTransform – Kartézské transformace
MCP_SetKinTransform_Arm – Kinematické transformace robot ARM
MCP_SetKinTransform_UR – Kinematická transformace pro UR robot
MC_AddAxisToGroup – Přidání osy do skupiny os
MC_GroupContinue – Pokračování v přerušeném pohybu
MC_GroupDisable – Převedení skupiny do stavu GroupDisabled
MC_GroupEnable – Převedení skupiny do stavu GroupStandby
MC_GroupHalt, MCP_GroupHalt – Zastavení koordinovaného pohybu (přerušitelné)
MC_GroupInterrupt, MCP_GroupInterrupt – Přerušení pohybu skupiny os
MC_GroupReadActualAcceleration – Aktuální zrychlení skupiny os
MC_GroupReadActualPosition – Aktuální poloha skupiny os
MC_GroupReadActualVelocity – Aktuální rychlost skupiny os
MC_GroupReadError – Chyby ve skupině os
MC_GroupReadStatus – Stav skupin os
MC_GroupReset – Nulování chyb os ve skupině
MC_GroupSetOverride, MCP_GroupSetOverride – Nastavení násobivých faktorů na osách ve skupině
MC_GroupSetPosition, MCP_GroupSetPosition – Nastavení polohového offsetu skupiny os
MC_GroupStop, MCP_GroupStop – Zastavení koordinovaného pohybu
MC_MoveCircularAbsolute, MCP_MoveCircularAbsolute – Pohyb do pozice po kružnicích (absolutní souřadnice)
MC_MoveCircularRelative, MCP_MoveCircularRelative – Pohyb do pozice po kružnicích (relativní souřadnice)
MC_MoveDirectAbsolute, MCP_MoveDirectAbsolute – Nekoordinovaný pohyb do pozice (absolutní souřadnice)
MC_MoveDirectRelative, MCP_MoveDirectRelative – Nekoordinovaný pohyb do pozice (relativní souřadnice)
MC_MoveLinearAbsolute, MCP_MoveLinearAbsolute – Pohyb do pozice po přímkách (absolutní souřadnice)
MC_MoveLinearRelative, MCP_MoveLinearRelative – Pohyb do pozice po přímkách (relativní souřadnice)
MC_MovePath, MCP_MovePath – Generování obecné trajektorie v prostoru
MC_MovePath_PH – Generování obecné trajektorie v prostoru PH
MC_ReadCartesianTransform – Přečtení použité kartézské transformace
MC_SetCartesianTransform, MCP_SetCartesianTransform – Kartézská transformace
MC_UngroupAllAxes – Odebrání všech ose ze skupiny
RM_AxesGroup – Skupina os pro koordinované řízení pohybu
RM_Feed – MC „krmič“
RM_Gcode – CNC řízení pohybu
RM_GroupTrack – Sledování polohy/rychlosti
[Předchozí] [Na začátek] [Výše] [Další]
2024 © REX Controls s.r.o., www.rexygen.com