Chapter 22
MC_COORD – Motion control - coordinated movement blocks
The MC_COORD library is specifically designed for the coordination of multi-axis motion control within complex systems. It encompasses a variety of blocks, including MC_MoveLinearAbsolute for executing precise linear movements, complemented by MC_MoveLinearRelative for relative linear motion. For the execution of circular motion, the library incorporates MC_MoveCircularAbsolute alongside MC_MoveCircularRelative, ensuring detailed circular trajectories. In the context of managing group axis control, this library introduces MC_AddAxisToGroup, which is further supported by functionalities such as MC_GroupEnable for activation, MC_GroupDisable for deactivation, and MC_GroupHalt for immediate stopping of grouped axes. Furthermore, the library provides MC_MoveDirectAbsolute and MC_MoveDirectRelative, enabling direct control over axis movements. For navigating through complex paths, MC_MovePath is made available. Essential monitoring and control features are facilitated by MC_GroupReadActualPosition for positional data, MC_GroupReadActualVelocity for velocity insights, MC_GroupReadError for error detection, and MC_GroupReadStatus for status updates. Additionally, the library integrates MC_ReadCartesianTransform and MC_SetCartesianTransform, which are vital for Cartesian transformation processes. This collection of functionalities underscores the library’s significance in applications that demand the synchronized control of multiple axes, particularly in the realms of robotics and automation systems.
MCP_GroupInterrupt – Read a group interrupt
MCP_GroupSetOverride – Set group override factors
MCP_GroupSetPosition – Sets the position of all axes in a group
MCP_GroupStop – Stopping a group movement
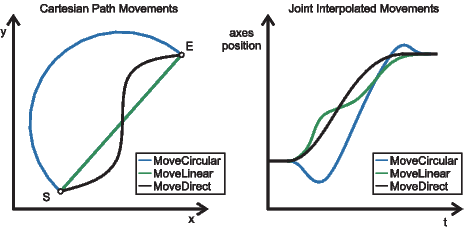
MCP_MoveCircularAbsolute – Circular move to position (absolute coordinates)
MCP_MoveCircularRelative – Circular move to position (relative to execution point)
MCP_MoveDirectAbsolute – Direct move to position (absolute coordinates)
MCP_MoveDirectRelative – Direct move to position (relative to execution point)
MCP_MoveLinearAbsolute – Linear move to position (absolute coordinates)
MCP_MoveLinearRelative – Linear move to position (relative to execution point)
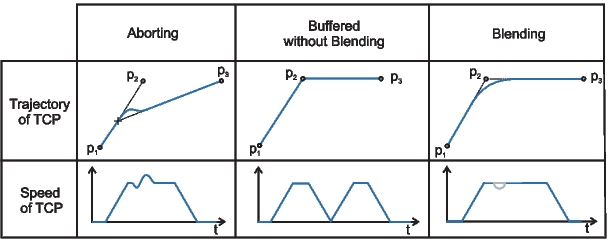
MCP_MovePath – General spatial trajectory generation
MCP_MovePath_PH – General spatial trajectory generation PH
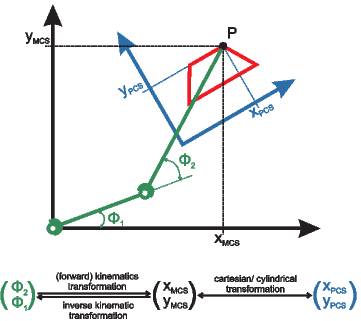
MCP_SetCartesianTransform – Sets Cartesian transformation
MCP_SetKinTransform_Arm – Kinematic transformation robot ARM
MCP_SetKinTransform_UR – Kinematic transformation for UR robot
MC_AddAxisToGroup – Adds one axis to a group
MC_GroupContinue – Continuation of interrupted movement
MC_GroupDisable – Changes the state of a group to GroupDisabled
MC_GroupEnable – Changes the state of a group to GroupEnable
MC_GroupHalt – Stopping a group movement (interruptible)
MC_GroupInterrupt, MCP_GroupInterrupt – Read a group interrupt
MC_GroupReadActualAcceleration – Read actual acceleration in the selected coordinate system
MC_GroupReadActualPosition – Read actual position in the selected coordinate system
MC_GroupReadActualVelocity – Read actual velocity in the selected coordinate system
MC_GroupReadError – Read a group error
MC_GroupReadStatus – Read a group status
MC_GroupReset – Reset axes errors
MC_GroupSetOverride – Set group override factors
MC_GroupSetPosition, MCP_GroupSetPosition – Sets the position of all axes in a group
MC_GroupStop – Stopping a group movement
MC_MoveCircularAbsolute – Circular move to position (absolute coordinates)
MC_MoveCircularRelative – Circular move to position (relative to execution point)
MC_MoveDirectAbsolute – Direct move to position (absolute coordinates)
MC_MoveDirectRelative – Direct move to position (relative to execution point)
MC_MoveLinearAbsolute – Linear move to position (absolute coordinates)
MC_MoveLinearRelative – Linear move to position (relative to execution point)
MC_MovePath – General spatial trajectory generation
MC_MovePath_PH – General spatial trajectory generation PH
MC_ReadCartesianTransform – Reads the parameter of the cartesian transformation
MC_SetCartesianTransform – Sets Cartesian transformation
MC_UngroupAllAxes – Removes all axes from the group
RM_AxesGroup – Axes group for coordinated motion control
RM_Feed – MC Feeder ???
RM_Gcode – CNC motion control
RM_GroupTrack – T
[Previous] [Back to top] [Up] [Next]
2024 © REX Controls s.r.o., www.rexygen.com