Chapter 20
MC_COORD – Motion control - coordinated movement blocks
RM_AxesGroup – Axes group for coordinated motion control
RM_Feed – MC Feeder
RM_Gcode – CNC motion control
MC_AddAxisToGroup – Adds one axis to a group
MC_UngroupAllAxes – Removes all axes from the group
MC_GroupEnable – Changes the state of a group to GroupEnable
MC_GroupDisable – Changes the state of a group to GroupDisabled
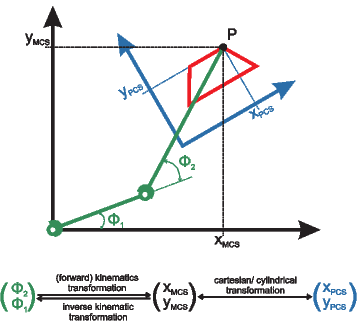
MC_SetCartesianTransform – Sets Cartesian transformation
MC_ReadCartesianTransform – Reads the parameter of the cartesian transformation
MC_GroupSetPosition, MCP_GroupSetPosition – Sets the position of all axes in a group
MC_GroupReadActualPosition – Read actual position in the selected coordinate system
MC_GroupReadActualVelocity – Read actual velocity in the selected coordinate system
MC_GroupReadActualAcceleration – Read actual acceleration in the selected coordinate system
MC_GroupStop – Stopping a group movement
MC_GroupHalt – Stopping a group movement (interruptible)
MC_GroupInterrupt, MCP_GroupInterrupt – Read a group interrupt
MC_GroupContinue – Continuation of interrupted movement
MC_GroupReadStatus – Read a group status
MC_GroupReadError – Read a group error
MC_GroupReset – Reset axes errors
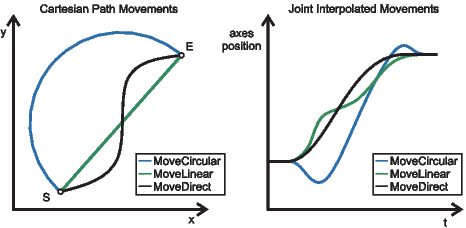
MC_MoveLinearAbsolute – Linear move to position (absolute coordinates)
MC_MoveLinearRelative – Linear move to position (relative to execution point)
MC_MoveCircularAbsolute – Circular move to position (absolute coordinates)
MC_MoveCircularRelative – Circular move to position (relative to execution point)
MC_MoveDirectAbsolute – Direct move to position (absolute coordinates)
MC_MoveDirectRelative – Direct move to position (relative to execution point)
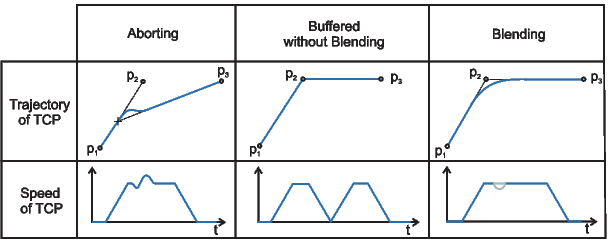
MC_MovePath – General spatial trajectory generation
MC_GroupSetOverride – Set group override factors
RM_Feed – MC Feeder
RM_Gcode – CNC motion control
MC_AddAxisToGroup – Adds one axis to a group
MC_UngroupAllAxes – Removes all axes from the group
MC_GroupEnable – Changes the state of a group to GroupEnable
MC_GroupDisable – Changes the state of a group to GroupDisabled
MC_SetCartesianTransform – Sets Cartesian transformation
MC_ReadCartesianTransform – Reads the parameter of the cartesian transformation
MC_GroupSetPosition, MCP_GroupSetPosition – Sets the position of all axes in a group
MC_GroupReadActualPosition – Read actual position in the selected coordinate system
MC_GroupReadActualVelocity – Read actual velocity in the selected coordinate system
MC_GroupReadActualAcceleration – Read actual acceleration in the selected coordinate system
MC_GroupStop – Stopping a group movement
MC_GroupHalt – Stopping a group movement (interruptible)
MC_GroupInterrupt, MCP_GroupInterrupt – Read a group interrupt
MC_GroupContinue – Continuation of interrupted movement
MC_GroupReadStatus – Read a group status
MC_GroupReadError – Read a group error
MC_GroupReset – Reset axes errors
MC_MoveLinearAbsolute – Linear move to position (absolute coordinates)
MC_MoveLinearRelative – Linear move to position (relative to execution point)
MC_MoveCircularAbsolute – Circular move to position (absolute coordinates)
MC_MoveCircularRelative – Circular move to position (relative to execution point)
MC_MoveDirectAbsolute – Direct move to position (absolute coordinates)
MC_MoveDirectRelative – Direct move to position (relative to execution point)
MC_MovePath – General spatial trajectory generation
MC_GroupSetOverride – Set group override factors
[Previous] [Back to top] [Up] [Next]
2020 © REX Controls s.r.o., www.rexygen.com